







Категория: Инструкции
Загрузите в контроллер манипулятора программу meArm_Code_generator и в ней задайте номера пинов, к которым подключены соответствующие серво, переменные резисторы и кнопка. При необходимости исправьте минимальные и максимальные углы
Подключите манипулятор к источнику питания
Откройте Монитор порта (кнопка с лупой сверху справа)
Вращением рукояток резисторов выставьте нужное положение манипулятора
Нажмите кнопку, в Мониторе порта должны появиться текущие координаты
Если манипулятор должен совершить еще движения, повторите пункты 2…4
Сохраните всю строку из Монитора порта в текстовый документ (выделить и нажать Ctrl+C)
Воспроизведение движений в автоматическом режимеЗагрузите в контроллер манипулятора программу meArm_Code_commanderи в ней задайте номера пинов, к которым подключены соответствующие серво. При необходимости исправьте минимальные и максимальные углы
Подключите манипулятор к источнику питания
Откройте Монитор порта (кнопка с лупой сверху справа)
Скопируйте строку кода, сделанного при обучении в Монитор порта (левой кнопкой мыши на строку сверху и Ctrl+V)
При правильном выполнении инструкций манипулятор должен повторять движения, записанные в процессе обучения





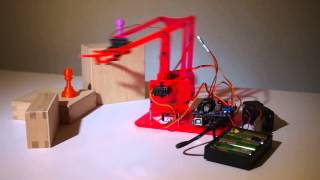









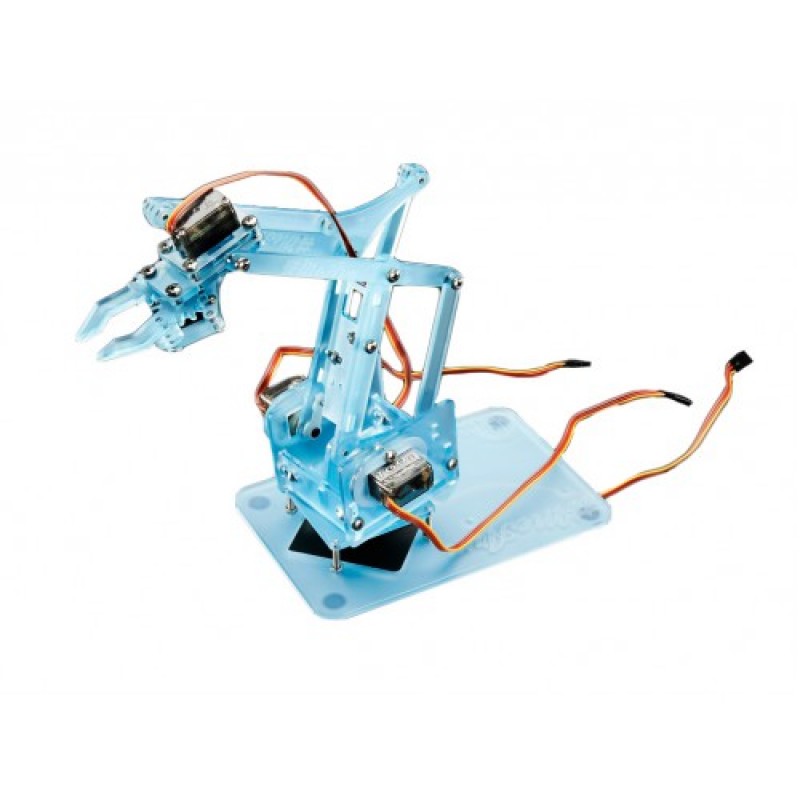
Разработчики из Великобритании Бенджамин Грэй и Джек Ховард создали роботизированный комплект под названием MeArm в качестве недорогого робота с открытым исходным кодом. Этот проект направлен на тех, кто уже знаком с Arduino, Raspberry Pi или другими платами управления.

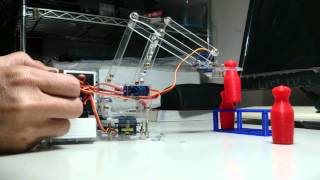
На данный момент создатели MeArm ищут финансовую поддержку на сайте Kickstarter, чтобы обеспечить робота платформой, которая называется MeBrain. Она имеет пару джойстиков для управления роботом MeArm, с помощью которых пользователь сможет контролировать механизм и даже записать несколько движений для дальнейшего воспроизведения.

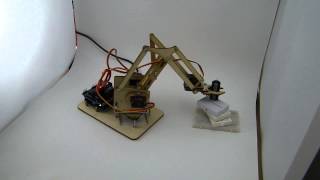
Все файлы для самостоятельной сборки комплекта MeArm будут предоставлены в свободном доступе, что и является целью проекта. Все части робота выполнены по чертежам с помощью лазерной резки. Такой набор будет очень полезен энтузиастам, которые заинтересованы в программировании, роботехнике и радиоэлектронике. К тому же, робот MeArm будет требовать минимальных затрат и предоставит массу удовольствия.
Понравилась новость? Жми!
MeArm – миниатюрный робот с открытым исходным кодом Reviewed by admin on Dec 20. Разработчики из Великобритании Бенджамин Грэй и Джек Ховард создали роботизированный комплект под названием MeArm в качестве недорогого робота с открытым исходн Разработчики из Великобритании Бенджамин Грэй и Джек Ховард создали роботизированный комплект под названием MeArm в качестве недорогого робота с открытым исходн Rating: 0
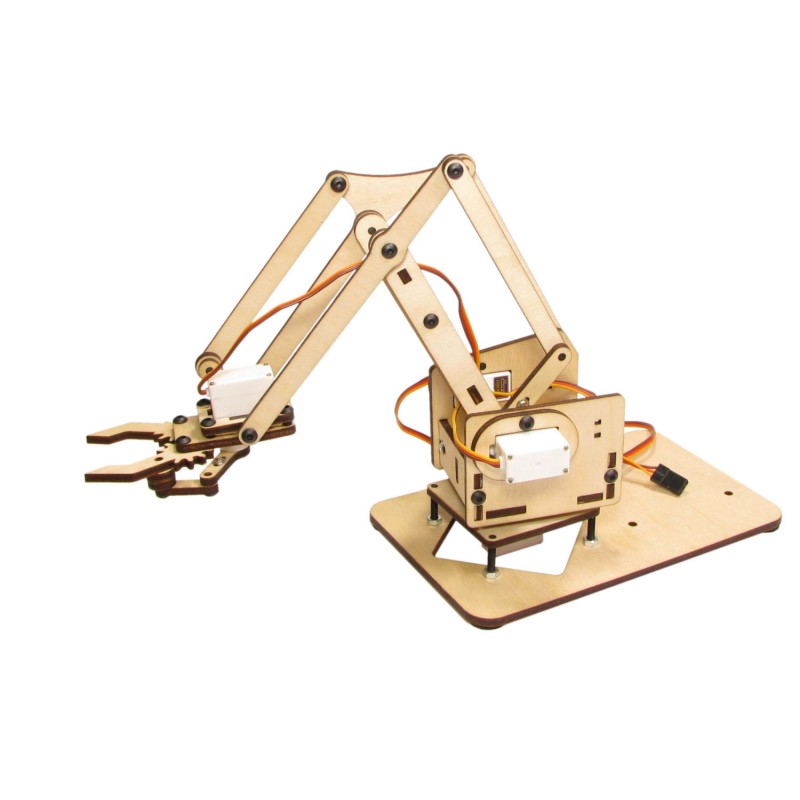
Данный манипулятор собирается на компонентах Ардуино
В данный конструктор входят - детали для сборки, винты с гайками и инструкция. Дополнительно нужно приобрести 4 мини серводвигателя SG90 и соответственно плату Arduino (например UNO ) c проводами и другими необходимыми вам компонентами.
Код для платы Ардуино - управление четырьмя потенциометрами:
Servo myservo0, myservo1, myservo2, myservo3 ; // create servo object to control a servo
int potpin0 = 0; // analog pin used to connect the potentiometer
int potpin1 = 1; // analog pin used to connect the potentiometer
int potpin2 = 2; // analog pin used to connect the potentiometer
int potpin3 = 3; // analog pin used to connect the potentiometer
int val0; // variable to read the value from the analog pin
int val1; // variable to read the value from the analog pin
int val2; // variable to read the value from the analog pin
int val3; // variable to read the value from the analog pin
void setup()
<
Serial.begin(9600);
myservo0.attach(11); // attaches the servo on pin 11 to the servo object
myservo1.attach(10); // attaches the servo on pin 10 to the servo object
myservo2.attach(9); // attaches the servo on pin 9 to the servo object
myservo3.attach(6); // attaches the servo on pin 6 to the servo object
>
void loop()
<
val0 = analogRead(potpin0); // reads the value of the potentiometer (value between 0 and 1023)
val0 = map(val0, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
myservo0.write(val0); // sets the servo position according to the scaled value
Serial.println(val0);
delay(15); // waits for the servo to get there
val1 = analogRead(potpin1); // reads the value of the potentiometer (value between 0 and 1023)
val1 = map(val1, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
myservo1.write(val1);
Serial.println(val1); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
val2 = analogRead(potpin2); // reads the value of the potentiometer (value between 0 and 1023)
val2 = map(val2, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
myservo2.write(val2); // sets the servo position according to the scaled value
Serial.println(val2);
delay(15); // waits for the servo to get there
val3 = analogRead(potpin3); // reads the value of the potentiometer (value between 0 and 1023)
val3 = map(val3, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
myservo3.write(val3); // sets the servo position according to the scaled value
Serial.println(val3);
delay(15); // waits for the servo to get there
>
Ваш отзыв: Примечание: HTML разметка не поддерживается! Используйте обычный текст.
Оценка: Плохо Хорошо
Введите код, указанный на картинке:








