






Категория: Руководства
![]()
Для работы с микроконтроллером Milandr в качестве среды программирования после продолжительных экспериментов я выбрал Keil. Очень хотел использовать бесплатную среду программирования CooCox CoIDE, но с milandr подружить ее так и не удалось. Так же рассматривал IAR, но данная среда насколько я понял не будет работать с микроконтроллерами миландр с использованием программатора ST-LINK/V2 которым я обладаю.
Далее я расскажу о том, как установить Keil и подготовить его к работе с микроконтроллерами фирмы Миландр.
Для начала необходимо скачать последнюю версию Keil с официального сайта, для этого идем по адресу https://www.keil.com/download/product/, выбираем MDK-ARM, в моем случае предложили скачать версию 5.18а.

Проходим процедуру регистрации, после чего дают ссылку на скачивание. Загрузив последнюю версию запускаем установку. Установка проходит достаточно просто, поэтому описывать там нечего.

После установки, запускаем keil. При первом запуске запустится Pack Installer который проверит установленные пакеты на наличие обновлений и если обновления есть, обновит их используя интернет.

Теперь нам необходимо добавить keil пакетом поддержки контроллеров миландр. Для этого идем на страницу программного обеспечения сайта миландр http://milandr.ru/index.php?page=programmnoe-obespech .

Скачиваем пакет для Keil MDK5 и распаковываем его. В Pack Installer жмем File -> Import и открываем загруженный нами только что пакет.


После установки пакета видим внизу сообщение: “Cannot install Pack mdr_spl_v1.4.1: Cannot compile SVD file(s) ”. Не обращаем на это внимание, во вкладке Devices должен появиться раздел Milandr, а во вкладке Packs раздел Keil::MDR1986ВЕхх.

Закрываем Pack Installer и запускаем Keil.
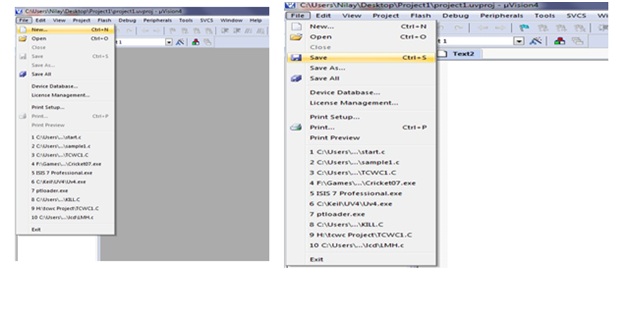
Попробуем создать проект. Для этого в меню keil жмем Project -> New uVision Project…. вводим имя проекта test, в форме Select Device for Target видим контроллеры Milandr.

Выбираем один из контроллеров в списке, в следующей форме жмем Ок. Проект создан.
В созданном проекте жмем Target 1 -> Source Group 1. правая кнопка мыши, в открывшемся меню выбераем Add New Item to Group ‘Source Group 1’… Создаем файл main.c, и пробуем в нем что-нибудь написать. Видим, что вместо русских букв пишется какая-то хрень.

Это происходит от того, что по умолчанию keil не может работать с кириллицей. Будем русифицировать, для этого качаем этот архив с русификатором.
В архиве лежит readme.txt, читаем и следуем инструкции:
1. Запустить прилагаемый рег-файл, перезагрузить компьютер.
2. Заменить файл UvEdit.dll в папке с установленным keil на файл из архива.
3. Всё, теперь кейл и читает и пишет по русски.

На данный момент наш keil готов к нормальной работе с микроконтроллерами фирмы Миландр. Единственным ограничением остается trial версия с ограничением по размеру компилируемого кода 32кб. Здесь три решения:
1. Работать как есть, с ограничением.
2. Купить лицензию keil.
3. Воспользоваться генератором паролей keygen.exe и зарегистрировать программу. Здесь я выложить кейген не могу, могу только подсказать что он есть в любой сборке кейла на любом торренте. Генерируем ключ по CID из File -> License Management… и получаем лицензию до 2020 года.
В следующей статье я покажу как создать в Keil первый простой проект под отладочную плату LDM-К1986ВЕ92QI.
Оставить комментарий

















08-Ноя-15 20:13 (1 год 1 месяц назад, ред. 20-Ноя-16 18:18)
MDK ARM, антология с 3.40 до 5.21 версии
Год/Дата Выпуска. 2007-2016
Версия. 3-5
Разработчик. Keil™
Сайт разработчика. http://www.keil.com
Разрядность. 32bit
Язык интерфейса. Английский
Таблэтка. Присутствует
Системные требования. Win XP и старше
Описание. Программный пакет разработки RealView Microcontroller Development Kit (MDK ARM) компании Keil объединяет компилятор C/C++ ARM RealView и интегрированную среду разработки Keil uVision. Этот продукт предоставляет в распоряжение разработчика многофункциональную среду разработки, оптимизированную для работы с широкой линейкой микроконтроллеров на базе ядра ARM. MDK ARM обеспечивает поддержку устройств, базирующихся на ARM7, ARM9 и Cortex M3 таких производителей, как Analog Devices, Atmel, Freescale, Luminary, OKI, NXP, Samsung, Sharp, STMicroelectronics и TI. Использование MDK ARM позволяет уменьшить цикл проектирования и существенно сократить время выхода продукта на рынок. MDK ARM — идеальное средство, стандартизированное для промышленных проектов с развитой системой отладки и поддержкой реального времени.
Библиотека RL ARM — RealView® RealTime Library
• RTX Real Time Kernel — полнофункциональная операционная система реального времени RTX Keil, которая осуществляет управление процессорным временем, семафорами (для распределения ресурсов), событиями (для синхронизации задач) и почтовыми ящиками (для связи между задачами). RTX легко настраивается при помощи файла конфигурации.
• TCP/IP Networking Suite — коммуникационный модуль на базе стека TCP/IP, специально адаптированный для встраиваемых приложений. Он включает в себя TCP и UDP-сокеты, PPP и SLIP интерфейсы, DNS, Telnet, TFTP, SMTP, встроенный вебсервер и CGI с защитой паролем. Стек работает как с Ethernet, так и с последовательным интерфейсом (модемом). Сконфигурированные примеры предназначены для работы на нескольких стандартных демонстрационных платах.
• Flash File System — система, которая позволяет сохранять файлы на Flash, ROM или RAM. Это полезно в решениях, где требуется большое количество памяти для хранения данных или для систем с интернет интерфейсами HTTP или FTP.
• USB Device Interface — драйверы USB, которые позволяет подключать стандартные устройства, такие как HID или Mass Storage.
• CAN Interface — в RTX Keil входят библиотеки CAN, которые предоставляют мощный и простой интерфейс для различных контроллеров CAN.
Библиотека RL-ARM создана для решения типовых задач, которые встают перед разработчиком, и позволяет:
• управлять несколькими заданиями на одном CPU;
• контролировать время выполнения задачи;
• осуществлять связь и конфигурировать взаимодействие между различными программами в системе;
• осуществлять доступ к Internet через Ethernet или последовательное соединение (модем);
• реализовать встроенный веб-сервер, включающий в себя CGI-скрипты;
• реализовать E-mail через Simple Mail Transfer Protocol (SMTP).
Скриншоты окна About
Что здесь собрано:
MDK3. 3.40, 3.50, 3.80a
MDK4. 4.00, 4.01, 4.03, 4.03a, 4.10, 4.11, 4.12, 4.13a, 4.14, 4.20, 4.21, 4.22, 4.22a, 4.23, 4.50, 4.53, 4.54, 4.60, 4.70a, 4.71a, 4.72, 4.72a, 4.73, 4.74
MDK5. 5.00, 5.01, 5.10, 5.11, 5.11a, 5.12, 5.13, 5.14, 5.15, 5.16a, 5.17, 5.18a, 5.20, 5.21
Legacy Support. все версии
RL-ARM. 3.80, 4.00, 4.01, 4.05, 4.10, 4.12, 4.13, CMIS RTOS 4.20
Пакеты для 5й ветки можно взять отсюда
Чтобы скачать .torrent файл необходима регистрация
Сайт не распространяет и не хранит электронные версии произведений, а лишь предоставляет доступ к создаваемому пользователями каталогу ссылок на торрент-файлы. которые содержат только списки хеш-сумм
Первый Самостоятельный Вылет — это для лётчиков! Первый Самостоятельный Проект — это для эмбеддеров. ??
Несмотря на ажиотаж относительно Кортексов, особенно STM-овских, я думаю, что ядро ARM7TDMI ещё долго будет сосуществовать со всеми остальными. Для нас (я имею в виду страны бывшего Советского Союза) во многом этому будет способствовать наличие русскоязычной литературы (вернее назвать переводов) по данному семейству. В частности в интернете имеется неплохие книги товарищей Мартина, Редькина и др. Моё изучение микроконтроллеров ARM началось с книги уже упомянутого Тревора Мартина «Микроконтроллеры ARM7. Семейство LPC2000 компании Philips». Это позволило вникнуть в основы. Ну а далее — изучение даташитов, юзер/программ/референс — мануалов и опыт, накопленный ранее.
Имеется у меня макетка с LPC2148 на борту, и именно её я использую в данной статье в качестве подопытного микроконтроллерного модуля. Процесс освоения нового семейства контроллеров практически всегда рассматривается эмбеддерами на опыте ранее изученного семейства. Поэтому я вовсю буду использовать свои наработки и опыт для AVR контроллеров фирмы ATMEL. В качестве IDE я выбрал Keil от MDK. Выбор могу обосновать хорошими отзывами на форумах и бесплатной демоверсией с ограничением кода до 32кБ. Если у Вас ещё нет — скачайте демоверсию Keil. и установите на компьютер самым обычным способом. В качестве программатора-отладчика я использую JetLink8. Для него также необходимо скачать и установить драйвера. Сразу оговорюсь — при установке Keil следите, чтобы путь к его папкам, в том числе и с Вашими будущими проектами не проходил через названия с кириллицей («Мои документы» и пр.) — имена должны быть только латинским шрифтом.
Макет для исследований состоит из непосредственно платы с LPC2148. программатора-отладчика J-link8. соединительных проводов и, в качестве светодиода использован индикатор питания платы микроконтроллерного модуля ATtiny2313. Серый кабель USB на модуле LPC2148 — для питания этого модуля, чёрный кабель USB — подключение J-link8 .
Серый кабель USB на модуле LPC2148 — для питания этого модуля, чёрный кабель USB — подключение J-link8 .
Первоначально я хотел назвать статью «Основы работы в Keil «, но, подумав, изменил название. Потому как про начало работы в Кейле написано немало, однако почти все они на основе уже готовых примеров, которые идут в библиотеках вместе с дистрибутивом. Безусловно, это в какой-то мере это правильно, но ведь именно созданный полностью своими руками, пусть даже самый простой проектик, принесёт гораздо больше пользы, чем готовый из папки «Examples». Чтобы не нарушать традицию пусть это будет «Hello, world» в микроконтроллерном исполнении, т.е. моргание светодиодом. В Кейле открываем «Project» -> «New uVision Progect». Откроется окно Create New Project. В нём стандартно нужно набрать название проекта и выбрать папку его сохранения. Я назвал проект LPC2148_pr и сохранил его в папку My_project. После сохранения Кейл предложит выбрать микроконтроллер для проекта. Для меня это LPC2148 .
Для меня это LPC2148 .
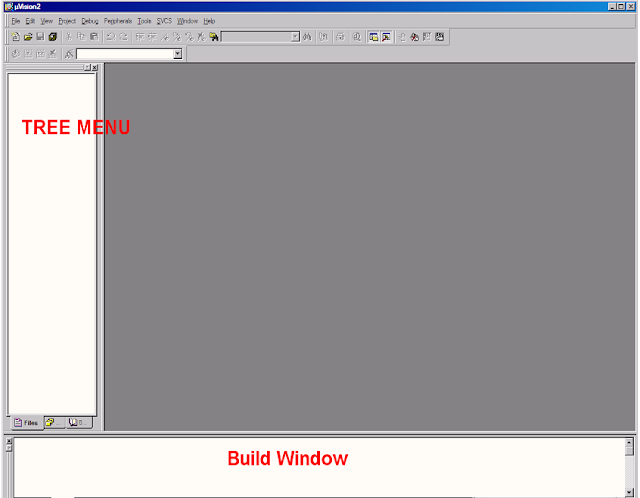
После выбора кристалла будет предложено добавить в проект файл startup.s — добавляем. Это файл инициализации контроллера, о нём хорошо написано во многих источниках, в частности у DI HALTA. После указанных действий мы увидим следующую картину: т.е. открытый, пока пустой проект, в левой части которого на вкладке Project отображаются все имеющиеся в нём файлы. Пока что там один startup.s. Теперь давайте мыслить по AVR-овски — нужен, конечно, главный исполняемый Си-шный файл. Создадим его «File» -> «New» или соответствующим значком на панели. Сохраним как main.c (расширение указать обязательно) в папку нашего проекта. Однако, даже после сохранения в папку проекта этот Си-шный файл в сам проект ещё не добавлен. Для добавления кликаем правой клавишей мыши по папке «Source Group 1» на расположенной слева вкладке Project:
т.е. открытый, пока пустой проект, в левой части которого на вкладке Project отображаются все имеющиеся в нём файлы. Пока что там один startup.s. Теперь давайте мыслить по AVR-овски — нужен, конечно, главный исполняемый Си-шный файл. Создадим его «File» -> «New» или соответствующим значком на панели. Сохраним как main.c (расширение указать обязательно) в папку нашего проекта. Однако, даже после сохранения в папку проекта этот Си-шный файл в сам проект ещё не добавлен. Для добавления кликаем правой клавишей мыши по папке «Source Group 1» на расположенной слева вкладке Project: и в выпавшем окне кликаем Add Files to Group «Source Group 1». В появившемся окне браузера выбираем наш main.c и щёлкаем ADD. В результате Вы увидите слева на вкладке Project в списке файлов проекта добавленный main.c. Главный файл добавлен, но он пустой как шаманский бубен. На его наборном поле кликнем правой клавишей мыши. Верхняя срока выпавшего меню «insert ‘#include <LPC214x.H>’ » предложит добавить в этот файл заголовочный h-файл семейства микроконтроллера для которого мы делаем проект — добавляем. Это действие мы всегда делали и для AVR- писАли #include <avr/io.h>. ведь правда же? А далее я просто наберу простейшую программу, которая будет мигать светодиодом. Причём, используя привычный для себя синтаксис для Си.
и в выпавшем окне кликаем Add Files to Group «Source Group 1». В появившемся окне браузера выбираем наш main.c и щёлкаем ADD. В результате Вы увидите слева на вкладке Project в списке файлов проекта добавленный main.c. Главный файл добавлен, но он пустой как шаманский бубен. На его наборном поле кликнем правой клавишей мыши. Верхняя срока выпавшего меню «insert ‘#include <LPC214x.H>’ » предложит добавить в этот файл заголовочный h-файл семейства микроконтроллера для которого мы делаем проект — добавляем. Это действие мы всегда делали и для AVR- писАли #include <avr/io.h>. ведь правда же? А далее я просто наберу простейшую программу, которая будет мигать светодиодом. Причём, используя привычный для себя синтаксис для Си. После набора и проверки я скомпилировал проект. Это можно сделать нажатием на иконку, на кнопку F7 или через меню Project. В нижней части в окне Build Output видны результаты компиляции. Самое время залить прошивку в микроконтроллер, но не будем спешить — не всё ещё настроено так как надо, мы даже не создали нужный для заливки hex-файл.
После набора и проверки я скомпилировал проект. Это можно сделать нажатием на иконку, на кнопку F7 или через меню Project. В нижней части в окне Build Output видны результаты компиляции. Самое время залить прошивку в микроконтроллер, но не будем спешить — не всё ещё настроено так как надо, мы даже не создали нужный для заливки hex-файл.
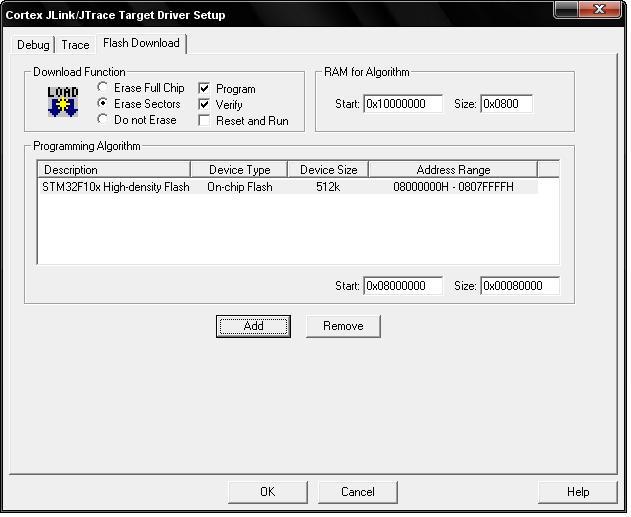
Через меню Project, соответствующей иконкой или Alt-F7 откроем вкладку Option for Target ‘Target 1’ — опции для нашего проекта. Первая закладка «Device» понятна — мы в ней выбирали используемый микроконтроллер. Во второй закладке «Target» установите частоту работы микроконтроллера, остальное можно пока не менять. В третьей закладке «Output» поставьте галку Create HEX file. В закладках «Listing», «User», «C/C++», «Asm», «Linker» пока можно ничего не менять, а оставить по умолчанию — разберёмся с тонкостями потом. В «Debug» необходимо выбрать отладку в симуляторе или с помощью аппаратных средств. Подробнее остановлюсь на последней закладке «Utilities». В ней отмечаем Use Target Driver for Flash Programming. В выпадающем списке выбираем используемый программатор (в моём случае — это J-Link/J-Trace), и нажимаем кнопку Settings — т.е. настройка программатора. В открывшемся окне ставим точку напротив функций стирания: полное стирание контроллера, стирание сектора или вообще запрет стирания — я выбрал стирание сектора. Далее ставим галки Program, Verify и Reset and Run для программирования, верификации, сброса и дальнейшего запуска после прошивки соответственно. В списке Programming Algorithm кликаем Add и в выпавшем списке выбираем алгоритм программирования для своего контроллера. В моём случае это «LPC200 IAP2 512kB Flash» Щёлкаем Add и два раза OK. Заново скомпилируем проект. Теперь в окне Build Output появилось сообщение о создании hex-файла.
Щёлкаем Add и два раза OK. Заново скомпилируем проект. Теперь в окне Build Output появилось сообщение о создании hex-файла.
Если программатор правильно подключён и на микроконтроллер подано питание, то загрузка исполняемого кода произойдёт в результате нажатия иконки «Load» или через меню Flash. В случае успешной прошивки Вы увидите сообщение в окне Build Output и мигающий светодиод — результат Вашего первого самостоятельного проекта в Keil.
и мигающий светодиод — результат Вашего первого самостоятельного проекта в Keil.
Теперь о граблях. Я всё никак не мог впереть, почему у меня не запускается микроконтроллер после успешной прошивки, ведь в окне Buil Output выскакивает положительный результат, такой же как и скриншоте вверху. Оказалось, что на вкладке «Output» окна Option for Target ‘Target 1’ нужно УБРАТЬ галку с Debug Information, а на вкладке «Linker» УСТАНОВИТЬ галку на Use Memory Layout from Target Dialog.
Теперь интереса ради откройте проект Blinky из папки Examples. Вы увидите в общем-то практически такой же проект. Однако группы файлов там логически разделены, присутствуют некоторые файлы, которых нет у нас в проекте (Retarget.c и rt_misc.h — я, кстати, так и понял нафиг они там нужны?) и добавлен текстовый файл с якобы документацией проекта. В будущем мы будем делать так же, а на данный момент стояла задача быстрого САМОСТОЯТЕЛЬНОГО старта. Я считаю мы её достигли!
P.S. Я не рассматривал здесь какие-то основополагающие вопросы, типа почему для сброса разряда нужно писАть единицу, или для чего нужен startup. Подразумевается, что люди, читающие эти строки имеют желание и некоторый опыт работы с контроллерами, а также могут почитать даташит, хотя бы в порядке ознакомления.
Запись опубликована в рубрике ARM с метками Keil. LPC. Добавьте в закладки постоянную ссылку.
В данной статье создадим первый рабочий проект в среде uVision от Keil, откомпилируем его, прошьем отладочную плату STM32VLDiscovery, рассмотрим некоторые «подводные камни», которые будут по мере работы над проектом.

Итак начнем. Для начала создаем пустой новый проект, в меню выбираем PROJECT -> New uVision Project, сохраняем его (проект имеет расширение .uvproj), выбираем в окне наш МК, в STM32VLDiscovery это STM32F100RB:

Создадим новый файл с исходным кодом, сохраняем его, присвоив ему расширение .c, добавляем его к проекту в новую группу, также добавляем файлы библиотеки CMSIS, зачем они нужны в следующем уроке, пока просто добавляем:

В окне проекта на вкладке Target видим установки адресов памяти IROM и IRAM, эти значения устанавливаются автоматически при выборе соответствующего чипа, менять их крайне нежелательно:

Идем во вкладку Output и здесь ставим галочки напротив тех типов файлов, которые мы хотим получить на выходе проекта (Debug Information необходим для отладки устройства, HEX File – прошивка микроконтроллера):

Переходим во вкладку C/C++, если наш проект использует include файлы, то здесь необходимо в поле Include Paths установить пути до этих файлов:

Далее у нас идет настройка вкладок Debug и Utilities, где производится установка отладчика STLINK, в прошлом уроке мы это уже делали. Все на этом настройка проекта закончена, можно приступать к написанию кода.
Сделаем простую мигалку светодиодами, которые висят у нас на порту С (PC8, PC9) попеременно через пол секунды, кстати в Keil нет функции delay, как в GCC для AVR, так что нам придется написать эту функцию самостоятельно используя таймер:
Ну что ж, можно и компилировать и собирать проект, жмем F7 и у нас выпадает следующая ошибка: C:\Keil\ARM\INC\ST\STM32F10x\stm32f10x.h(96): error: #35: #error directive: «Please select first the target STM32F10x device used in your application (in stm32f10x.h file). которая говорит нам, что необходимо выбрать процессор в файле stm32f10x.h, зачем это придумали делать вручную я не знаю, открываем в проекте это файл и раскомментируем #define с нашим процессором:

После чего компиляция происходит успешно. Вот собственно и все, напоследок видео мигания, может кому интересно)
ARM начинающим с нуля - KEIL с лекарсвом, методички, книги
Вот моя подборка материалов по ARM
Это материалы для быстрого старта в изучении этих микроокнтроллеров. Cодержание.
1. Статьи по ARM LPC2xxx на русском.
2. Примеры МОРЕ исходников и проектов для KEIL для GCC и для KEIL-PROTEUS
3. Методичка для студентов питерского университета - лабораторные с LPC2148 USB
4. Русский даташит lpc2104 lpc2105 lpc2106
5. скачать - "Книга ARM7 LPC2000 компании Philips Вводный курс" на русском.
Интересные конкурсные проекты на ARM можно найти на сайте журнала, скачать и использовать
http://www.circuitcellar.com/designs. s/winners.html
1. Советую использовать для ARM компилятор Keil.com с великолепнейшим симулятором !
http://www.keil.com/uvision/db_anl_logicanalyzer.asp

После установки сделайте копию установки чтоб исправить примеры которые измените при экспериментах.
2. Поработать в KEIL с ARM Стеларис можно на удаленном ПК через интернет - http://www.arm2day.narod.ru - ПРЯМО СЕЙЧАС.
3. Для связи ПК с ARM, прошивания и отладки - программа H-JTAG и схема адаптера с их сайта - http://www.hjtag.com/QA.html
4. Схему макетки для ARM и доку как с ней работать скачать на http://www.keil.com
Там мощнейшая база данный с ответами на ТЫСЯЧИ вопросов юзеров с примерами кода !
5. Русскоязычные советы и ответы по ARM есть на http://www.arm2day.narod.ru
там же схемы USB JTAG можно найти.
6. Советую скачать книгу - Guide To The Philips ARM7 LPC21xx Hitex (10 Мб PDF)
http://www.hitex.co.uk/arm/lpc2000bo. nloadpage.html
7. Скачйте апноуты - это примеры применения ARM от производителя NXP.com
8. Модели многих ARM есть в PROTEUS ! LPC2138 работает, я использовал.
Сообщение от Popeye
Уважаемый avr123-nm-ru. в свою бытность мучителя ПИКов доехался до PIC18. Для ординарных приложений кристалл отличный, однако для проектов позаковыристее мал. Тут думаю, на PIC24 ли переходить, на PIC32 ли. ИМХО путь один, напрямую к AVR и ничего меньше. Так что спасибо огромное за ссылки. Прочту обязательно.
А и если отрекомендуете некую схемку программатора JTAG на ПИКе буду очень благодарен. Тут увидел, да на AVR
Удачи!
Не могу с вами согласится. Ядро MIPS32 M4K в PIC32 отличное, не хуже ARM. Да и семейство 16-битников от Microchip также превосходное, особенно с DSP.
Меню пользователя realid
Почётный гражданин KAZUS.RU
Адрес: Болгария Перник
Сказал спасибо: 76
Сказали Спасибо 266 раз(а) в 168 сообщении(ях)
Я бы с милым седцем согласился, особо насчет PIC24, там и по мне компилятор имеется, да новость PIC32 настораживает. Я сейчас на 16F877A и 18F452 пашу, у первого 8 версия кристалла, у второго 7. Все что то доделывают, исправляют. А PIC32 года нету.
Сообщение от Popeye
Уважаемый avr123-nm-ru. в свою бытность мучителя ПИКов доехался до PIC18. Для ординарных приложений кристалл отличный, однако для проектов позаковыристее мал. Тут думаю, на PIC24 ли переходить, на PIC32 ли. ИМХО путь один, напрямую к AVR и ничего меньше. Так что спасибо огромное за ссылки. Прочту обязательно.
А и если отрекомендуете некую схемку программатора JTAG на ПИКе буду очень благодарен. Тут увидел, да на AVR
Удачи!
У avr123-nm-ru как обычно все свалено в одну кучу .Ткните носом пожалуйста в схему JTAG на AVR,а то что-то никак не найду
Меню пользователя Beduin
Почётный гражданин KAZUS.RU
Адрес: Болгария Перник
Сказал спасибо: 76
Сказали Спасибо 266 раз(а) в 168 сообщении(ях)
Снова порылся, нашел http://www.hjtag.com/download/WIGGLER2.rar Кажись программер на AVR увидел там же, на форуме, да сейчас ничего не выходит
Меню пользователя Popeye
Сказал спасибо: 1,136
Сказали Спасибо 2,289 раз(а) в 1,392 сообщении(ях)
Сообщение от Beduin
У avr123-nm-ru как обычно все свалено в одну кучу
Даже курсоры на скриншоте.
avr123-nm-ru Не плохо бы ссылочки проверять, комплект фул версии - сливаю уже пятый час и все бестолку.
__________________
Осторожно. злой кот
От методички плакал.
"2. Цель работы.
Познакомиться с возможностями USB контроллера.
3. Порядок выполнения работы.
1.Открыть проект 06_USB.
2.Скомпилировать и запустить программу на отладочной плате.
3.При питании не от USB порта, соединить USB кабелем отладочную плату и компьютер.
4.Подождать, пока в компьютере не обнаружится новое устройство. Как правило, в операционных системах семейства Windows, начиная с Win2000, нет необходимости устанавливать дополнительные драйвера.
5.Изучить появившийся диск. Попробовать прочитать и записать на него информацию."
Правильно хотят поубавить университетов. Некоторые даже на ПТУ не тянут.