







Категория: Руководства
1.1 Иерархия цифровых систем связи. 8
1.2 Иерархия систем управления сетями электросвязи. 9
1.3 Варианты использования возможностей модуля СК-120. 12
2. ОБОРУДОВАНИЕ ГИБКОГО МУЛЬТИПЛЕКСИРОВАНИЯ ОГМ - 30Е 17
2.1 Общее описание. 17
2.2 Принцип работы блока ОГМ. 18
2.3 Описание конструктива. 20
2.4 Шина ST-BUS 21
2.5 Шины управления CTRL-O и CTRL-I в блоке ОГМ-30Е 22
2.5.1 Формат передачи и приема информации по шинам управления. 23
2.5.2 Формат передачи информации по шине CTRL-O 23
2.6 Передача массивов информации 25
2.7 Передача информации от плат к УМ-120 26
2.7.1 Трансляция данных, передаваемых по «национальным битам», по шинам CTRL-O и CTRL-I. 28
2.7.2 Протокол управления: 29
3. СОВРЕМЕННЫЕ ТЕХНОЛОГИИ ПРОЕКТИРОВАНИЯ И ПРОИЗВОДСТВА РЭА. 31
3.1 Система автоматизированного проектирования Cadence. 31
3.2 Программируемые логические интегральные схемы фирмы ALTERA и система автоматизированного проектирования MAX+PLUS?II. 32
3.3 Технология поверхностного монтажа. 35
4. Модуль СК-120. 39
4.1 Общее описание. 39
4.2 Технические требования. 39
4.3 Структурная схема СК-120. 40
4.3.1 Микроконтроллер. 40
4.3.2 Коммутатор. 42
4.3.3 Устройства сопряжения и оптическая развязка. 43
4.3.4 Блок питания: 43
4.4 Функциональная схема СК-120. 43
4.4.1 Работа микроконтроллера: 43
4.4.2 Работа ПЛИС: 44
4.4.3 Работа блока питания: 45
4.5 Коммутация каналов и JTAG. 45
4.5.1 Коммутация SCC1: 46
4.5.2 Коммутация SCC2. 47
4.5.3 Коммутация SCC3. 47
4.5.4 Коммутация SCC4. 47
4.6 Принципиальная схема. 48
4.6.1 Схема электрическая принципиальная подключения памяти. 48
4.6.2 Схема электрическая принципиальная подключения ПЛИС. 49
4.6.3 Схема электрическая принципиальная подключения интерфейсов. 50
4.7 Моделирование работы. 52
4.8 Расчет надежности. 53
4.8.1 Расчет интенсивности отказов для элементов. 54
4.8.2 Расчет надежности модуля СК-120. 55
5. Экономическое обоснование проекта. 56
5.1 Ситуация на рынке средств связи. 56
5.2 Расчет стоимости проектирования платы. 57
5.2.1 Расчет стоимости проектирования платы СК-120 58
5.3 Расчет стоимости производства плат 59
5.3.1 Расчет стоимости производства платы СК-120 61
5.4 Расчет чистого дисконтированного дохода. 64
6. Охрана труда 67
6.1 Организация рабочего места оператора ЭВМ. 67
6.1.1 Оборудование рабочего места оператора ЭВМ. 67
6.1.2 Вредные факторы в работе. 68
6.1.3 Требования к организации и оборудованию рабочих мест с ВДТ и ПЭВМ. 73
6.1.4 Расчёт освещённости рабочего места. 76
6.2 Организация рабочего места монтажника радиоэлектронных элементов 78
6.2.1 Оборудование рабочего места монтажника радиоэлектронных элементов. 79
6.2.2 Вредные и опасные факторы в работе 80
6.2.3 Требования безопасности 81
Приложение 1 Программа для ПЛИС. 90
Приложение 2 Диаграмма работы TSA. 95
БИБЛИОГРАФИЧЕСКИЙ СПИСОК. 96
0.Введение.Сегодня рынок телекоммуникаций является наиболее бурно развивающимся. По данным компании Anderson Consulting[8], общий объём его в 1994 году составил 700 млрд. долл. а к 2000 г. прогнозируется его удвоение. И хотя основной вклад в эти миллиарды вносят оплата телекоммуникационных услуг и продажа оборудования, по темпам роста впереди всех должен оказаться сектор систем управления телекоммуникациями. Так, компанияVertel- один из лидеров в области платформ управления для телекоммуникационных систем - утверждает, что оборот этого сектора рынка к 2000 г. должен вырасти до 8 млрд. долл. что по сравнению с 500 млн. долл. в 1995 г. даёт 16-кратное увеличение.
Деятельность любой организации, независимо от ее размера, немыслима без связи. Это привело к тому, что теперь и Россия стремится к развитию этой области. Предприятия специализирующиеся в этой области если и не создают что то новое, но по крайней мере стремятся догнать западные страны. Поскольку результат деятельности любого предприятия напрямую зависит от четкой координации действий, а это возможно лишь при наличии хорошо налаженного взаимодействия со своими подразделениями и с окружающим деловым миром. По оценкам специалистов руководители организаций 20-40 % рабочего времени тратят на телефонные переговоры. Надежная связь особенно важна для организаций, занятых в экономической сфере.
Поскольку телекоммуникационные сети представляются собой неоднородную систему, то становиться необычайно актуальным вопрос об использовании современных технологий в системах управления сетями. На актуальность этого вопроса воздействует ряд причин. Во-первых, пока российские специалисты вынуждены работать с западными продуктами и технологиями, а следовательно, серьёзно изучать практику и тенденции их использования западными потребителями. Во-вторых, стоимость систем управления очень высока (сотни тысяч долларов), а эксплуатация сетевого оборудования предполагает обязательное их наличие. И, наконец, каждые один – два года значительно изменяются сами технологии. Так же можно заметить, что при внедрении системы управления переплетаются интересы сразу трех сторон – производителя программного обеспечения и аппаратуры, системного интегратора и оператора связи.
Для более полной реализации возможных сетевых решений производитель управляемых объектов вынужден сам обеспечивать их управляемость или ориентироваться на продукцию фирм союзниц. Это объясняется стремлением захватить рынок, обеспечить решение задач поддержки. В тоже время производитель осуществляет скрытое внедрение своих технологий через обучение и распространение информации, причем не технической, а маркетинговой.
Системные интеграторы вынуждены решать проблемы интеграции сетевых объектов разных производителей. При этом они рассматривают комплекс задач – таких, как управление, инсталяция, настройка, поддержка. Инвестиционные. информационные и квалификационные ограничения на этом уровне приводят зачастую системного интегратора к односторонней ориентации на одно – два опробованных решения или к обострению противоречия "владеть-управлять"
Внедрение системы управления оператором связи или владельцем крупной гетерогенной сети приводит к необходимости рассмотрения следующих взаимозависимых аспектов:
И если 3-5 лет назад решение комплекса этих проблем было возможно на уровне сетевых инженеров или сетевых администраторов, то теперь это может быть решено только на уровне руководителя информационных ресурсов предприятия.
В то же время операторы связи хотели бы, чтобы:
была информация о текущем состоянии управляемого объекта;
сообщения о сбоях автоматически генерировались и поступали на консоль;
каждый тип сообщений имел набор интерпретаций и рекомендации по устранению сбоя;
имелась автоматическая диагностика сбоя по сообщению и включению режима автоматического исправления ситуации;
режимы функционирования (статусы) объектов управления, а также действия по переводу объекта из одного статуса в другое были типизированы, причем всё это должна отслеживать система;
к управляемому объекту был обеспечен удаленный доступ;
наличествовал механизм тонкого разграничения полномочий между пользователями системы;
система управления была документирована, имела встроенный инструментарий и подробные инструкции пользования им для того, чтобы самим писать приложения для подгонки и настройке системы;
Сегодня существует два основных направления:
Системы основанные на SNMPпротоколе;
Системы основанные на CMIP протоколе;
1. Simple Network Management Protocol (SNMP) - это протокол уровня приложений, необходимый для обмена управляющей информацией между сетевыми устройствами. SNMP позволяют сетевому администратору управлять пропускной способностью сети, находить и разрешать проблемы в сети, управлять конкретными устройствами, а также планировать развитие сети. С протоколомSNMP связаны две основные проблемы.
2. Common Management Information Protocol (CMIP)Протокол общей управляющей информации (CMIP - Common Management Information Protocol) - это стандарт управления для сетей, соответствующих модели OSI. CMIP содержит гораздо более надежный набор средств сетевого управления, чем SNMP.
Основное различие между CMIP и SNMP состоит в том, что в SNMP не различаются объект и его атрибуты. Объект может быть устройством, а атрибут - характеристикой этого устройства или параметром, описывающим его. На практике это означает, что, если в сети часто проводятся изменения, SNMP сопровождать сложно, несмотря на простоту его реализации. В среде SNMP приходится формировать новые определения для каждого из устройств, которые создаются для SNMP-ceти, даже если такие устройства очень похожи на уже существующие. При работе с CMIP для новых устройств можно использовать уже созданные определения; нужно просто включить дополнительные атрибуты, чтобы можно было отличить новые устройства. Новые объекты "наследуют" определения старых.
Еще одно преимущество CMIP по сравнению с SNMP - безопасность. Работа над средствами защиты для CMIP продолжается, тогда как в SNMP механизма защиты нет. Если администратор сети не отключит команду SET протокола SNMP, кто угодно сможет задавать команды для SNMP-устройства и управлять им.
Однако, несмотря на неоспоримые преимущества CMIP над SNMP реализациясистемы управления на этом протоколе не оптимально, в виду значительных ценовых затрат, сложности, а также возникающих проблем сопряжения с уже существующих системами на основеSNMPпротокола.
В России сегодня руководствуются документом определяющим “Временные технические требования к комплексу программно-технических средств автоматизированной системы технической эксплуатации для магистральной и внутризоновых первичных сетей”.
Данный документ распространяется на комплекс программно-технических средств автоматизированной системы технической эксплуатации для магистральной и внутризоновых первичных сетей взаимоувязанной сети связи (ВСС) РФ. Он также распространяется на характеристики элементов и параметры основных интерфейсов, обеспечивающих взаимодействие между ними. К тому же он распространяется на все вновь разрабатываемые программно-технические средства автоматизации технической эксплуатации ВСС РФ, а также на существующие отечественные и зарубежные средства автоматизации, подлежащие сертификации, доработке или модернизации с целью использования в составе автоматизированной системы технической эксплуатации ВСС РФ.
Основой для данных требований является рекомендация ССЭ – М3010 “Эта Рекомендация представляет общие архитектурные сведения для Сети Управления Передачей данных (TMN) и обеспечения требований Администраций по планированию, обеспечению, установке, поддержке, эксплуатации и управлению сетями передачи данных и предоставлению услугам.”
В то же время ориентация исключительно на М3010 не дает возможности оператору построить эффективную систему управления (т.е. в смысле соотношения цены/эффективности). Более того, сегодня существуют операторы, использующиеSNMP-управление, и переход на “чистый”TMNдля них нереален.
Для реализации подобных свойств системы, а также требование по совместимости с ранее выпускавшимся оборудованием, в блок оборудования ОГМ-30Е выпускаемого ОАО "Морион", был добавлен модуль, который реализует функции агента SNMP для оборудования ОГМ-30Е под названием СК-120.
1.Аналитический обзор. 1.1Иерархия цифровых систем связи.К настоящему времени уже сложилась и нормализована МККТТ иерархия цифровых систем передачи – первичные, вторичные, третичные и четверичные системы. Первичные ЦСП строятся на принципе импульсно-кодовой модуляции передаваемых непрерывных сигналов. При этом осуществляется аналого-цифровое преобразование входных сигналов в передающей части аппаратуры и обратное цифро-аналоговое преобразование в приемной части аппаратуры.
Цифровые системы передачи второй и более высоких ступеней иерархии строятся на принципе объединения – разделения цифровых потоков, сформированных в ЦСП более 6низких ступеней иерархии.
Впервые ЦСП первой ступени иерархии были разработаны в США в начале 60-х годов и предназначались для передачи 24 сигналов ТЧ (ИКМ-24). Скорость передачи цифрового потока в линейном тракте составляла 1544 Кбит/с. Несколько позже подобная система была разработана в европейских странах и СССР. Однако эти системы, в отличии от разработанной в США имели не т24 канала. а 30 т.е ИКМ-30 и имели скорость передачи цифрового потока в линейном тракте 2048 Кбит/с. Система подобного типа легла в основу другой европейской иерархии ЦСП.
К 1990 г. МККТТ разработал рекомендации по единой синхронной цифровой иерархии (SDH), позволяющей объединять цифровые потоки, образованные системами передачи, входящими в любую существующую иерархию.
Параметры цифровых потоков, получаемых на тех или иных ступенях иерархии, должны соответствовать рекомендациям МККТТ. Это позволяет унифицировать оборудование первичной сети и облегчает организацию международных связей.
Скорости цифровых потоков одной и той же ступени иерархии, на образуемых ЦСП, расположенными на различных станциях сети, могут несколько отличаться друг от друга в пределах допустимой нестабильности задающих генераторов. Это требует принятия специальных мер по объединению потоков в поток более высокой ступени иерархии, что заметно усложняет эксплуатацию первичной сети связи в целом и снижает ее качественные показатели.
Системы иерархии, где объединяются потоки с небольшими расхождениями скоростей, называются плезиохронными (PDH). Если же обеспечить синхронность объединяемых потоков, то резко упрощается техника их объединения и разделения. Кроме того, обеспечивается прямой доступ к компонентам составляющих потоков без разделения общего, а также появляются заметные преимущества эксплуатации и технического обслуживания сети связи.
В разработанной системе синхронной цифровой иерархии скорость передачи на первой ступени установлена равной 155520 Кбит/с, что выше верхней скорости европейской PDH(139264 Кбит/с). Установлены также скорости высших ступеней: второй - 155520 х 4 = 622080 Кбит/с и третьей - 622080 х 4 = 2483200 Кбит/с. Кроме того, рассматривается вопрос об установлении скоростей передачи ниже первой ступени, что позволит получить преимуществаSDHна современных спутниковых и радиорелейных линиях связи, где скорости цифровых потоков обычно не превышают 60 Мбит/с.
1.2Иерархия систем управления сетями электросвязи.В течение последних 10-15 лет, то есть с момента широкого внедрения во многие сферы жизнедеятельности человечества вычислительной техники и систем связи, в развитых странах наблюдается неуклонный рост интереса к вопросам управления сетями связи. В связи с этим постоянно появляется новый инструментарий, реализующий все больший и больший объем функций управления и мониторинга. При этом для обобщения принципов управления и непосредственно инструментов анализа и управления сетями применяется термин “управляющая платформа ”.
Управляющая платформа основывается на едином прикладном программном интерфейсе (API), определяемом и поддерживаемым различными производителями. При этом разработчики концентрируются на специфике приложений, поскольку платформа обеспечивает не только независимость от производителя, но и необходимые базовые средства.
В сочетании с термином “управляющая платформа” применяются следующие понятия, используемые при построении сети управления:
агент - программные средства, присутствующие на объекте управления и мониторинга, собирающие и хранящие необходимую информацию о нем;
менеджер - программные средства, размещенные в пунктах управления (например, пульте оператора и т.п.), позволяющие собирать и обрабатывать информацию от агентов;
протокол управления - набор стандартов на вид и процедуру обмена управляющей информацией между агентами и менеджерами через существующую транспортную сеть;
база управляющей информации
информационная база данных (MIB).При формировании агентом содержит модель объекта управления в виде набора параметров и характеристик. При формировании менеджером содержит сведения обо всех объектах управления, их состоянии, параметрах и характеристиках.
Все обзоры средств управления сетью непременно упоминают системы ведущих производителей компьютеров. IBM, AT&T,DEC, HP, SunSoft, Cabletron System, а также инструментарий фирм Novell и Microsoft, предназначенный для локальных и глобальных сетей персональных компьютеров.
Управляющие платформы IBM и AT&T реализуют иерархическую схему, а DEC, HP и Sun Microsystems в той или иной степени предпочитают распределенную архитектуру.
Абстракции, используемые в имеющихся стандартах для описания понятий "объект управления " и "задача управления", носят аксиоматичный характер. Например, согласно МСЭ-Т Х.722 управляемый объект определяется атрибутами;управляющими действиями;сообщениями, которые генерируются управляемыми объектами; поведением. Так в моделиOSIс объектом управления ассоциируется понятие ресурс. Все это необходимо учитывать, а также анализировать требования, зафиксированные в стандартах, применительно к конкретной системе управления.
Классификация задач управления в том или ином стандарте ?это тоже чистая абстракция. Например, основной задачей управления оператора связи, которая в соответствии с Рек. МСЭ-Т М3010 выполняет и функции технической эксплуатации, является поддержание функционирования сети связи в целом и её отдельных элементов на уровне, обеспечивающем предоставление услуг с заданным качеством и надежностью при минимизации эксплуатационных расходов т. С точки зрения семиуровневой моделиOSIв функциональном плане на прикладном уровне объектами управления являются службы электросвязи. Однако эти же службы предоставляют собой объекты и других систем – таких, например, как системы эксплуатации и системы денежных расчетов. Поэтому нужно определить те аспекты служб, которые являются объектами именно, скажем системы эксплуатации.
Система расчетов обеспечивает организацию всевозможных оплат с учетом взаимозависимости заказов и правил производства того или иного типа оплаты. В отличии от них система управления предназначена для наблюдения за ресурсами, установки и изменения правил использования, идентификации типов режимов использования, обеспечения переходов между режимами. Следовательно, система эксплуатации пользуется системой управления. Однако она использует ресурсы для решения своих задач и поэтому имеет свою собственную систему эксплуатации.
В качестве примера можно рассмотреть следующую ситуацию:
В соответствии с функциональной иерархической структурой TMNсистема управления телекоммуникационной сетью должна выполнять следующие задачи на соответствующих четырех функциональных уровнях:
управление бизнесом (первый уровень)
управление услугами (второй уровень)
управление сетью ( третий уровень)
управление элементами сети (четвертый уровень)
Если в качестве ресурса рассматривается отдельный элемент сети. то относящиеся к нему задачи управления принадлежат к типу задач управления элементами сети (например, коммутатор)
Пусть в качестве ресурса рассматривается более сложная система – сеть. На этом уровне имеют место задачи управления сетью (например комплексом оборудования сети передачи данных).
Если, в качестве ресурса рассматривается некоторый сервис, о здесь налицо задачи управления услугами. В данном случае от уровня управления услугами зависит количество и качество предоставляемых услуг связи.
Если в качестве ресурса используется бизнес-процесс, состоящий, например, из некоторого набора взаимосвязанных услуг, то возникают задачи управления бизнесом.
Вывод. Таким образом система управления должна решать множество различных задач. Однако, основной функцией системы управления является оптимизация работы сети. При этом из предъявляемых к системе требований по адаптивности вытекают высокие требованиям по управляемости.
1.3Варианты использования возможностей модуля СК-120.Модуль предназначен для управления оборудованием (изделиями) производства ОАО “Морион” с использованием протокола SNMP,а также выполняет функцииSNMP агента, реализованного на микроконтроллере МС68360. Модуль используется в составе оборудования ОГМ–30Е.
Для выполнения функций управления оборудованием модуль СК-120 имеет значительный набор возможных способов обеспечения связи. Набор интерфейсов заложенный в модуль, а именно:
SLIP1 (RS-232, RS-485)
SLIP2 (RS-232, RS-485)
RS-232 (наладочная консоль)
Линии связи с управляющей платой УМ-120.
Таким образом существует несколько вариантов управления оборудованием:
Рис. 1.1Управление локальной сетью
Рис. 1.2 Управление несколькими ветвями блоков ОГМ-30 через Еthernet
Рис. 1.3Управление несколькими ветвями блоков ОГМ-30
с использованием служебных каналов
где H - точка, соединённая через коммутатор с SCC3 (HDLC)
R - точка, соединённая через коммутатор с SCC4 (RS - 232)
M(0) - точка, скоммутированная на SCC1 в режиме Ethernet
M(1) - точка, скоммутированная на SCC1 в режиме HDLC
M(2) - точка, скоммутированная на SCC1 в режиме RS - 232
Рис. 1.4Управление несколькими ветвями блоков ОГМ-30 через модемы
Первые два варианта предназначены для обеспечения управления оборудования по сетевым протоколам, вариант с подключением через служебные каналы, предназначен для оперативной настройки и тестирования оборудования на месте, последний вариант также является необходимым ибо он отражает современные тенденции развития распределенных систем управления.
Вывод: В заключение можно сказать, что любой из данных вариантов является необходимым для обеспечения конкурентно способности и повышения управляемости выпускаемого оборудования.
Вывод: В результате проделанной работы была изучена аппаратура ОГМ (оборудование гибкого мультиплексирования) были поставлены задачи создания системы управления, для данного оборудования, совместимой с существующими в стране SNMPсистемами.
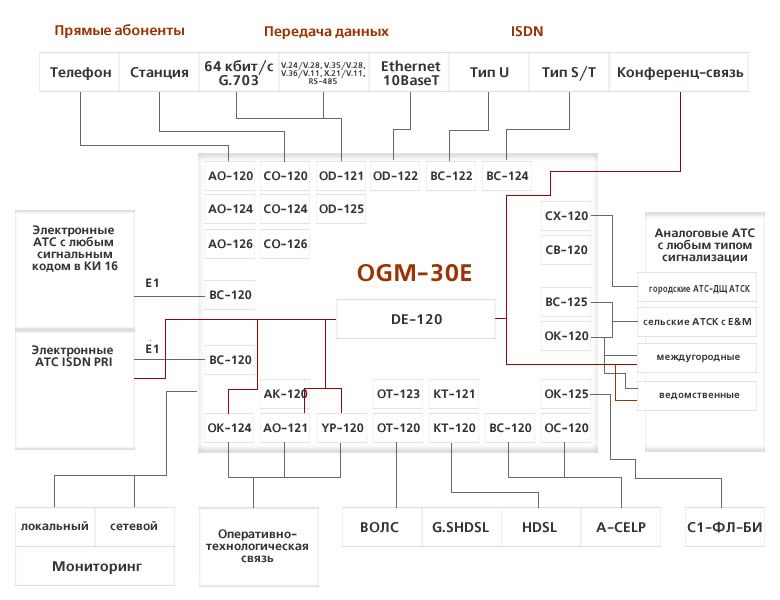
2.ОБОРУДОВАНИЕ ГИБКОГО МУЛЬТИПЛЕКСИРОВАНИЯ ОГМ - 30Е 2.1Общее описание.Блок ОГМ - 30Е предназначен для работы в телефонной сети и в зависимости от установленного аппаратного и программного обеспечения может работать в различных режимах.
оборудование, используемое для перераспределения основных цифровых каналов 64 Кбит/с между 4 первичными сигналами электросвязи 2048 Кбит/с со структурой цикла, соответствующей рекомендациям МСЭ G.703 (транс-мультиплексор);
оконечное оборудование для телефонных каналов и каналов передачи данных ;
оборудование для ввода/вывода телефонных каналов и каналов передачи данных на промежуточных пунктах (drop-insert);
оконечное оборудование используемое для согласования цифровых электронных АТС с аналоговыми АТС.
ОГМ - 30Е обеспечивает автоматический контроль функционирования и обнаружение неисправностей с помощью оборудования КС.
Формат данных потока 2048 Кбит/с соответствует Рек. G.704 МСЭ-Т, цифрового потока “сонаправленный стык” 64 Кбит/с -, преобразование аналогового телефонного сигнала в цифровой согласно Рек. G.711 МСЭ-Т. Общие вопросы функционирования - Рек. G.732 МСЭ-Т.
2.2Принцип работы блока ОГМ.Рисунок 2.1 Структурная схема ОГМ-30Е
Рассмотрим структурную схему оборудования гибкого мультиплексирования на основе данной структурной схемы.
Первичные цифровые групповые сигналы 2048 Кбит/с поступают на плату ОД-111, где происходит преобразование квазитроичных сигналов в униполярный двоичный код, HDB3 -AMI декодирование, выделение тактовой частоты 2048 Кгц и преобразование скоростей входных цифровых сигналов 2048 Кбит/с к скорости работы внутренних электронных коммутаторов, расположенных в плате ЦП-110. ОД-110 передаёт в плату ЦП-110 преобразованный принимаемый поток 2 Мбит/с по двум последовательным шинам BSR и BDR. Шина BDR несёт информацию, содержащуюся во всех канальных интервалах принимаемого потока, кроме 16-го; шина BSR - информацию 16-го КИ и служебную информацию.
Передача осуществляется аналогично. Плата ОД-111 принимает последовательные потоки от платы ЦП-110: данных - BDT, сигналов управления - BSR, формирует групповой поток 2048 Кбит/с, осуществляет кодирование и преобразует биполярные сигналы в квазитроичные для передачи в линию связи.
В плате ЦП-110 находится управляемый напряжением генератор 8192 Кгц, от которого плата вырабатываются все необходимые тактовые последовательности для работы блока ОГМ-30Е. сигнал синхронизации F0, тактовые частоты F2M и F4M ( рис.2.5.).
Рисунок 2.2Диаграммы частот генератора ОГМ-30Е.
Информация о работоспособности платы ОД-111, а также о состоянии входных потоков 2048 Кбит/с и внешнего сигнала синхронизации передаётся от ОД-111 по последовательной шине контроля CTRLI к плате УМ120 для последующей обработки и индикации аварийных состояний.
Одна плата ОД-111 осуществляет прием - передачу 2-х цифровых потоков 2048 Кбит/с. При необходимости обработки 3-х,4-х потоков 2048 Кбит/с устанавливаются две платы ОД-111.
Плата ЦП-110 осуществляет цифровую обработку и контроль принимаемых потоков 2048 Кбит/с, обработку и преобразование по заданной программе поступающей информации о сигнальных каналах, перераспределение основных цифровых каналов (ОЦК) 64 Кбит/с между первичными сигналами 2048 Кбит/с и последовательными шинами групповых сигналов плат ОК-110.
Плата может производить переключение до 120 основных цифровых каналов 64 Кбит/с поступающих в составе 4-х первичных цифровых групповых сигналах 2048 Кбит/с
Работая от внутреннего генератора, плата ЦП-110 синхронно обрабатывает последовательные шины от ОД-111:BDR1, BSR1 и передает в плату ОД-111 потоки BDT1, BST1. (Для 2-го потока: BDR2, BSR2, BDT2, BST2 и т. д.).
Для обмена данными с платами ОД-110, плата ЦП-110 формирует последовательные шины: BDI - приём информации ОЦК от плат ОД-110, BDI - передача информации ОЦК в платы ОД-110, ВSI - прием информации сигнальных каналов от плат ОД-110, ВSO - передача информации сигнальных каналов в платы ОД-110.
Плата ЦП-110 имеет стык RS-232 с персональным компьютером типа IBM РС для загрузки выполняемой программы, изменения программы обработки и коммутации сигналов, изменения конфигурации блока ОГМ-30Е, а также для тестирования блока и оперативного контроля за состоянием каналов.
Информация о состоянии входных цифровых групповых сигналов 2048 Кбит/с и всех обрабатываемых каналах, а также о работоспособности платы передаётся от ЦП-110 по последовательной шине CTRL к плате КС-110 для последующей обработки и сигнализации.
При использовании ОГМ для коммутации телефонных каналов в каркас устанавливаются платы канальных окончаний ОК-110. При необходимости приема и обработки поступающих по каналам ТЧ сигнальных частот, для совместной работы с платой ЦП-110 в блок ОГМ-30Е устанавливается плата цифровых фильтров ЦФ-110. Плата ЦФ-110 определяет наличие сигнальных частот в любом канале ОЦК, производит предварительный анализ выделенных частот в каждом канале.
Плата контроля и сигнализации УМ-120 осуществляет контроль за исправностью плат блока ОГМ-30Е, анализируя данные шины CTRL линии INTER.
Плата питания ПН-110 осуществляет преобразование напряжения батареи -60В в напряжения +5В для питания всех плат блока ОГМ-30Е.
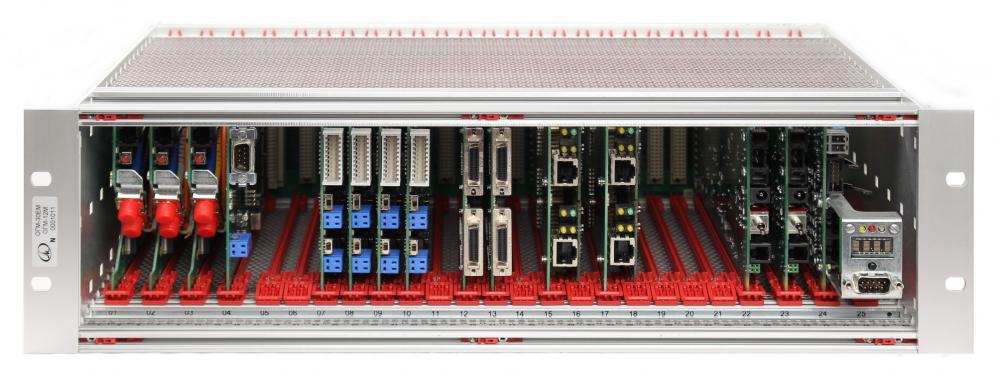
2.3 Описание конструктива.Конструктивно блок ОГМ-30E представляет собой однорядный съемный каркас евростандарта 19 дюймов. (см. рисунок 3.3)
Рисунок 2.3 Внешний вид оборудования ОГМ-30Е
В каркасе блока ОГМ-30Е устанавливаются съёмные платы, подключаемые к кросс-плате с помощью разъёмов.
Платы устанавливаются в каркас на места, обозначенные на фиксирующей планке, в соответствии с тех. паспортом на изделие. Подключение блока ОГМ-30Е к внешним устройствам производится через разъемы, установленные на лицевой стороне соответствующих плат.
Блок ОГМ-30Е предназначен для работы в помещениях в условиях:
- температура окружающего воздуха от 5° С до 4О° С;
- относительная влажность воздуха до 90 % при температуре 30° С;
- атмосферное давление не ниже 60 КПА (450 мм рт. ст.).
Блок ОГМ-30Е сохраняет свои параметры после пребывания при температуре минус 50° С и плюс 50° С.
2.4ШинаST-BUSВсе цифровые системы передачи должны осуществлять прием и передачу в соответствии с требованиями МККТТ, чтобы не возникало проблем их стыковки между собой. Однако при обработке группового сигнала непосредственно в самом оборудовании структура первичного цифрового группового сигнала подвергается преобразованию для облегчения обработки. Структура «внутреннего» группового сигнала может быть различной в разных устройствах, в зависимости от используемой элементной базы. В блоке ОГМ используются микросхемы фирмы «MITEL», работающие с потокомST-BUS.Преобразование первичного группового потока в поток ST-BUSосуществляется в микросхеме МТ8952В фирмы «MITEL» в плате внешнего стыка.
На выходе приемной части приемопередатчика МТ8952В формируются сигналы BDR1 и BSR1. Структура сигналов показана на Рис.
Рисунок 2.4 Структура сигналов на выходе приемной части приемопередатчика.
Каждый сигнал состоит из 32 временных интервалов ( ВИ ), которые составляют 1 цикл. Каждый временной интервал состоит из 8 бит.
В сигнале BDR1 каждый временной интервал ( ВИ ) содержит информацию соответствующую информации в канальном интервале ( КИ ) того же порядкового номера в первичном цифровом групповом сигнале.
В сигнале BSR1 содержится информация сверхцикла, т.е. КИ16 и служебная информация в служебных словах S1, S2, S3, S4. Соответствие между структурой сигнала BSR1 и структурой первичного цифрового группового сигнала ( цикл, КИ ) приведено в Табл. 2.1.
Электрические параметры сигналов соответствуют МОП-уровням. Скорость передачи сигналов равняется 2048 Кбит/с. Приемопередатчик имеет эластичную память, которая позволяет синхронизировать все выходные сигналы от одной частоты 2048 Кгц (сигнал F2M). F0 - метка начала сверхцикла, устанавливает приемопередатчик в синхронизм. Временные диаграммы сигналов показаны на Рис. 2.7.
На передающую часть приемопередатчика поступают сигналы BDT1, BST1, по кроссплате блока ОГМ.
Структура сигналов BDT1, BST1 не отличается от структуры сигналов BDR1 и BSR1.
Информация из ВИ сигнала BDT1 транслируется в соответствующий КИ первичного цифрового группового сигнала.
Рисунок 2.5 Временные диаграммы сигналов приемной части приемопередатчика
2.5Шины управленияCTRL-O и CTRL-I в блоке ОГМ-30ЕФункции управления и мониторинга выполняются в блоке ОГМ-30Е платой УМ-120. Для переноса информации между платой УМ-120 и остальными платами блока используются две шины:
CTRL-O- для передачи информации от УМ-120 управляемым платам;
CTRL-I - для передачи информации от плат к УМ-120.
2.5.1 Формат передачи и приема информации по шинам управления.Передача и прием информации происходят в пределах 125 мкс цикла. Начало цикла определяется сигналом «F0», передаваемом по шине «F0». Каждый цикл шинCTRL-O иCTRL-I делится на 256 битовых интервалов. Начало каждого интервала совпадает с фронтом сигнала «F2M». Правила обмена информации с шинами управления идентичны правилам обмена информацией с информационными шинами. Восемь битовых интервалов объединяются во временной интервал (ВИ). Канальный интервал, начинающийся сразу после метки «F0», нумеруется как «ВИ0», последний, интервал в цикле - «ВИ31». Внутри канального интервала биты нумеруются с «0» по «7». Бит с номером «7» передается на шину первым, а бит с номером «0» – последним.
2.5.2 Формат передачи информации по шинеCTRL-OДля передачи информации от платы УМ-120 к управляемым платам, используются первые пять временных интервалов – «ВИ0 – ВИ4».
В «ВИ0» передается адрес платы, связь с которой организуется в данном цикле. Первые два разряда этого канального интервала, позволяют организовать управление четырьмя блоками от одной платы УМ-120. Если эти два разряда равны «0», значит осуществляется адресация внутри блока, в котором установлена плата УМ-120, в противном случае направление передачи информации определяется переходной платой. Адрес платы определяется как место ее подключения к разъему кроссплаты. Пять разрядов адреса позволяют адресоваться к 31 плате, адрес «11111» не используется.
Рисунок 2.6 Формат «ВИ0» шины CTRL-O «Адрес платы»
В «ВИ1» передается адрес микросхемы на плате. Разряды «А0 – А3» позволяют адресовать до 16 микросхем. Разряд «R/W» определяет направление передачи информации: «0» - соответствует циклу записи данных передаваемых от платы УМ-120, «1» – данные будут передаваться из адресуемой платы. Для обеспечения возможности передачи к объектам больших массивов информации, используется флаг передачи массива «М». Организация передачи информационных массивов описана в разделе «Передача массивов информации».
Рисунок 2.7 Формат «ВИ1» шины CTRL-O «Адрес микросхемы»
Формат «ВИ2» и «ВИ3» зависит от адресуемого объекта. Ниже приводится формат этих канальных интервалов, используемый для управления ПЛИС.
Рисунок 2.8 Формат «ВИ2» шины CTRL-O «Адрес регистра»
Рисунок 2.9 Формат «ВИ3» шины CTRL-O «Данные»
Данные, передаваемые от УМ-120 к платам, находятся в «ВИ3» шины CTRL-O. В «ВИ-4» передается контрольная сумма циклического контроля для первых четырех байт (адрес платы, адрес микросхемы, адрес регистра и данные). С целью обеспечения достоверности передаваемой информации, плата, в адрес которой направлена информация, обязана подсчитать контрольную сумму циклического контроля (CRC-4), этих четырех байт и сверить ее с контрольной суммойCRC-4 полученной в «ВИ4». Если результат операции сравнения положительный («равно»), данные из промежуточных регистров ПЛИС транслируются в соответствующие микросхемы или регистры, в противном случае трансляция принятых данных запрещена. Результат операции сравнения транслируется в «ВИ-4» на шинуCTRL-I,биты с «3» по «0» (положительный результат сравнения соответствует «0» уровню сигнала шины), разряды с «7» по «4» «ВИ-4», шиныCTRL-I, в этом режиме не используются.
Формат байта CRC-4, передаваемый по шинеCTRL-O.
Бит «С0» младший бит контрольной суммы, «С3» - старший.
Формат данных, передаваемых в «ВИ-4» шины CTRL-I, во время цикла записи.
2.6Передача массивов информацииДля передачи больших массивов информации предусмотрена возможность передачи 16 байт данных в каждом цикле. При выполнении этой процедуры адресуется только первый байт передаваемого массива, а в регистре адреса микросхемы устанавливается разряд «М» – передача массива. Передача данных начинается с «ВИ3» и далее во всех нечетных канальных интервалах текущего и последующих циклов, до окончания массива. Формат передаваемого массива должен предусматривать возможность определения платой приемником информации длины передаваемых данных и самостоятельное завершение процедуры. Во время передачи массива, во втором и последующих циклах, адрес передаваемый в «ВИ0» всегда равен «11111».
2.7Передача информации от плат к УМ-120Передача информации от плат к УМ-120 осуществляется по шине CTRL-I. Временной интервал «ВИ4» общий для всех плат. Плата, адрес которой был передан в данном цикле по шинеCTRL-O, передает в этом временном интервале в цикле записи - результат сравненияCRС-4,цикле чтения - данные из регистров платы.
Кроме этого, каждая плата имеет на этой шине свой временной интервал, который соответствует адресу платы. Адрес первой платы равен «1», а последней платы 27. Формат данных, передаваемых платой в своем временном интервале (биты с 7 по 2), индивидуален и зависит от функций платы, а формат данных передаваемых в битах 1 и 0, общий для всех плат и позволяет определить следующие состояния платы:
«Рабочий режим» - плата установлена, питание подключено, аварии нет, плата управляема по шинам CTRL;
«Начальный сброс» – плата установлена, но не закончился переходной процесс начального сброса, или идет процесс загрузки ПЛИС из последовательного ПЗУ платы, плата не управляема по шинам CTRL;
«Авария» – авария платы – указывает что плата не находится в режиме начального сброса и на плате активен хотя бы один из источников сообщения об аварии, плата управляема по шинам CTRL;
«Нет платы» – плата отсутствует;
Ниже приводится формат данных, передаваемых платой в своем временном интервале и пример реализации схемы формирования битов D1, D0.
Рисунок 2.10 Формат сообщений в индивидуальном временном интервале платы по шине CTRL_I
Таблица состояний платы, передаваемых на шину CTRL-I в битах D1 и D0 Таблица 2.1
Плата находится в состоянии «Начальный сброс» или «Авария», если установлен хотя бы один из флагов «Alarm» или «Reset». Управление режимами работы платы (инициализация, изменение параметров) и мониторинг возможны только в состоянии «Управляемый режим».
Для платы КМ-120, всегда устанавливаемой на 4 место, выделяется два временных интервала на шинеCTRL-I – «ВИ26» и «ВИ27». Это необходимо для обеспечения передачи больших объемов информации для мониторинга со стороны платы КМ-120 в плату УМ-120. Формат передачи данных в «ВИ26», битыD1 иD0, соответствует общепринятому, а формат передачи данных в «ВИ27» находится в стадии разработки.
2.7.1Трансляция данных, передаваемых по «национальным битам», по шинамCTRL-O иCTRL-I.Для трансляции данных, передаваемых по «национальными битам» канала Е1, используются последние четыре временных интервала каждой шины управления. Каждому каналу Е1, организация которого возможна в ОГМ, выделяется один временной интервал. Временные интервалы распределены следующим образом:
«ВИ28» - первая плата ВС-120, первый канал;
«ВИ29» - первая плата ВС-120, второй канал;
«ВИ30» - вторая плата ВС-120, первый канал;
«ВИ31» - вторая плата ВС-120, второй канал;
Информация в «ВИ28 – ВИ31» передаются только в нечетных циклах. Временные интервалы шины CTRL-I, несущие информацию о «национальных битах», содержат бит статуса. Если бит статуса установлен в «1», то в данном цикле, для данного временного интервала, передается информация о состоянии «национальных битов» КИ0 нечетного цикла. Информация, передаваемая во «ВИ28 – ВИ31» по шинеCTRL-O, не содержит бит статуса, но она записываться в выходной регистр, из которого передается на шинуCTRL-O, только один раз за два цикла (всегда в четном или всегда в нечетном цикле).
Рисунок 2.11 Формат информации, передаваемой в «ВИ28 – ВИ31» шины CTRL-I.
2.7.2 Протокол управления:Первые восемь адресов ПЛИС осуществляющей связь платы с шинами CTRLрезервируются для общих протокольных функций.
ПЛИС, обеспечивающая управление платой по шинам CTRL-O и CTRL-I адрес микросхемы 00Н, исполняет следующие функции:
1.Триггер флага «Инициализация» .Адрес микросхемы 00Н. Адрес регистра флага 01Н. Пишется и читается. Передается и принимается в «0» бите байта данных. Перевод этого триггера в состояние «1», обеспечивает отключение этой платы от информационных шин и прекращение передачи в сторону внешних интерфейсов, плата готова к инициализации (смене режима работы). Схема начального сброса должна устанавливать этот триггер в состояние «1». По окончании инициализации платы, этот флаг устанавливается в состояние «0».
2.Регистр адреса платы. Адрес микросхемы 00Н. Адрес регистра 00Н. Регистр содержит информацию об идентификационном номере платы. Только читается. Младший бит адреса расположен в «0» бите байта данных.
Идентификационный номер платы имеет длину один байт и присваивается на этапе разработки.
3. Регистр версии программного обеспечения. Адрес микросхемы 00Н. Адрес регистра 02Н. Только читается. Регистр содержит информацию о варианте исполнения функций управления, позволяет избежать изменения идентификационного номера плата при коррекции схемы управления. Длина поля 3 бита (биты 2 – 0).
Все регистры управления должны обеспечивать функции чтения и записи, при этом адрес и формат данных функции записи, должен соответствовать адресу и формату функции чтения.
В связи с тем, что протоколы последовательных портов различных фирм значительно отличаются друг от друга (не зафиксировано место флага «запись/чтение», различен порядок передачи бит байта и т.д.), поддержка этих протоколов возлагается на ПЛИС, осуществляющую связь с шинамиCTRL.
3.СОВРЕМЕННЫЕ ТЕХНОЛОГИИ ПРОЕКТИРОВАНИЯ И ПРОИЗВОДСТВА РЭА. 3.1Система автоматизированного проектированияCadence.Последние десятилетия характеризуются бурным развитием электроники. Она проникла во все сферы жизнедеятельности человека. Сложность электронных устройств возрастет быстрыми темпами. Благодаря достижениям в современных технологиях производства электронных изделий достигнута очень высокая степень миниатюризации. Поэтому при разработке радиоэлектронной аппаратуры на современном базисе сейчас практически невозможно обойтись без мощных систем автоматизированного проектирования. Одной из наиболее хорошо развитых и пользующихся популярностью является САПР фирмы CadenceSystems Inc.CadenceSystems Inc.является мировым лидером в разработке т.н.EDA-систем (Electronic Design Automatization) - САПР для электронных систем.Cadence- система комплексной автоматизации процесса проектирования. Она включает в себя несколько взаимосвязанных и взаимодействующих модулей.
моделирование работы аналоговых устройств,
моделирование работы цифровых устройств,
моделирование работы смешанных устройств,
размещение компонентов (в ручном, и автоматическом режимах)
трассировку печатных проводников (в ручном, и автоматическом режимах)
температурный анализ при размещении элементов на плате ( для обеспечения нормальных тепловых режимов работы ).
анализ шумовых характеристик схемы
выпуск конструкторской документации ( чертежей принципиальных схем, печатных плат, сборочных чертежей и т.д.)
Cadenceдает возможность не только разработать печатную плату, но и по результатам физического моделирования откорректировать схему.
3.2Программируемые логические интегральные схемы фирмыALTERA и система автоматизированного проектированияMAX+PLUS? II.Программируемые логические интегральные схемы ( ПЛИС ), а в зарубежной литературе именуемые PLD ( programmable logic devices ), - это полу заказные цифровые БИС, которые благодаря архитектурным и технологическим особенностям можно разрабатывать и изготовлять без специализированного технического оборудования. ПЛИС появились на мировом рынке в середине 80-х гг. И сразу получили широкое распространение, переместив процесс создания специализированной БИС с завода на рабочее место проектировщика. Цикл разработки БИС сократился до нескольких часов, и значительно уменьшились соответствующие затраты.
С начала 90-х гг. наибольшим спросом пользуются ПЛИС. обладающие :
высокой логической интеграцией на основе технологий КМОП;
быстродействием до 80 -100 МГц и выше;
возможностью программирования ( загрузки внутренней конфигурации ) без программатора.
Всем этим требованиям соответствуют ПЛИС фирмы ALTERA( США ) - мирового лидера в области ПЛИС. В настоящее времяALTERAвыпускает семь семейств ПЛИС различной архитектуры [ 14 ].
В России наиболее известны ПЛИС классического ( Classic ) семейства, некоторое время выпускаемые компаниейINTEL. Основными преимуществами этих микросхем являются простота, низкая стоимость, удобные для монтажаDIP- корпуса, микропотребление энергии в статическом режиме и возможность поддержки отечественными средствами ( САПР “ФОРС+”, программаторы“Блиц”,”Стерх”,”Форсис”). ПЛИС ЕР220 заменяет любую микросхему серии 1556 ( ХП4, ХП6, ХП8, ХЛ8 ) .
Все ПЛИС изготавливаются по технологии КМОП с ультрафиолетовым стиранием( EPROM ), обеспечивающей следующие параметры энергопотребления:
в статическом режиме - 10-30 мкА;
на частоте 1 МГц - 2-8 мА;
при увеличении тактовой частоты - 1 мА/МГц.
Для снижения цены на 30-40%при серийном производстве изделий все ПЛИС также выпускаются в пластмассовых корпусах ( DIPи PLCC) с однократным программированием.
Недостатками ПЛИС классического семейства являются относительно невысокая степень интеграции и некоторые особенности архитектуры: отсутствие у триггеров входа установки в“1” ( SET ), блокирование контактов при реализации внутренних элементов памяти.
Этих недостатков полностью лишены ПЛИС семейств MAX7000и FLASHlogic, которые имеют матричную архитектуру, т.е. содержат программируемые матрицы логических вентилей“И”,”ИЛИ”и триггеры.
Семейство MAX7000состоит из семи микросхем со степенью интеграции от 1200 до 10000 эквивалентных логических вентилей, содержащих от 32( EPM7032 )до 256 ( EPM 7256) триггеров.
Дополнительно выпускается ПЛИС EPM7032V - функциональный аналог микросхемы EPM7032с напряжением питания 3,3 В.
ПЛИС семейства MAX7000изготавливаются по технологии КМОП с электрическим стиранием (EEPROM). Они обеспечивают:
минимальную задержку распространения сигнала от входа до выхода 5 нс.;
максимальную тактовую частоту 190 МГц;
до 100 циклов программирования/стирания.
ПЛИС семейства MAX7000имеют гибкую архитектуру. Их макроячейки содержат по две независимые линии обратной связи;с триггера и с контакта. Это позволяет использовать триггер в качестве внутреннего регистра, а контакт одновременно - как входной порт. Дополнительными ресурсами ПЛИС являются термы расширения (expander terms ) - конъюнкторы, инверсные выходы которых образуют обратные связи с матрицей элементов“И”. Термы позволяют формировать управляющие сигналы ( например, CLK, SET, RESET ) без затрат макроячеек. В результате перераспределения термов между макроячейками число входов элементов “ИЛИ” может быть увеличено до 32.
Каждая макроячейка имеет индивидуальный турбо бит, программирование которого позволяет уменьшить потребляемую мощность при некотором снижении быстродействия. Начиная с 1996 г. все ПЛИС семейства MAX7000 выпускаются в варианте ISP ( in system programmable - программируемые в системе ). Это позволяет программировать и стирать схему непосредственно на рабочей плате через 4-й сигнальный интерфейс. подключенный к порту компьютера. Наличие программатора становится необязательным, что значительно упрощает и удешевляет применение ПЛИС.
ПЛИС семейства MAX7000 имеют низкую стоимость. Например. цена микросхемы ЕРМ7032 составляет менее 7 $, а микросхемы ЕРМ7128 - менее 25$.
С появлением семейства MAX7000 значительно уменьшилась практическая ценность выпускавшихся ранее ПЛИС семейства MAX5000, т.к. появились аналоги всех микросхем ( например, ЕРМ5128 - ЕРМ7128 ) с лучшими характеристиками быстродействия и энергопотребления по более низким ценам.
MAX+PLUS® II - это система автоматического проектирования программируемых логических интегральных схем ( ПЛИС ), разработаннаяAltera Corporation, мировым лидером по производству ПЛИС.
MAX+PLUS® II - это многофункциональный программный продукт. обеспечивающий проектировщику возможность полного проектирования ПЛИС, начиная с ввода схемы, которую проектировщик собирается реализовать на ПЛИС и заканчивая программирования самой ПЛИС на программаторе.
MAX+PLUS® IIпредлагает следующие возможности для пользователя:
ввод внутренней структуры ПЛИС путем графического ввода функциональной схемы;
ввод внутренней структуры ПЛИС c помощью языка программирования высокого уровняAltera Hardware Description Language (AHDL), который полностью встроен в оболочкуMAX+PLUS® II ;
моделирование работы ПЛИС в виде временных диаграмм;
при наличии программатора произвести запись спроектированной структуры в ПЛИС и др.
При описании внутренней структуры ПЛИС с помощью AHDLвозможны несколько вариантов.
В первом варианте проводить описание структуры в примитивах, т.е. используя простейшие функции типа RS-триггер, D-триггер, T-триггер, JK-триггер и др.
При втором варианте проводить описание при помощи примитивов и мега-функций.
Мега-функции представляют собой сложные логические функции типа счетчик, мультиплексор, дешифратор, регистр и др.
Преимуществом первого варианта является то, что транслятор затрачивает меньше времени на преобразование простейших функций языка AHDLв машинные коды.
Недостатками данного варианта является большой объем текста программ и необходимость подробного описания всей системы.
Во втором варианте, при использовании мега-функций, отпадает надобность подробного описания элементов в том смысле. что программист задает только параметры сложной логической функции. Для примера, используя мега-функцию lpm_counterсчетчик можно описать. задав только тактируемый вход и ширину самого счетчика. Это значительно уменьшает объем, занимаемый текстом программы, а также позволяет несколько сократить время написания программы.
Недостатком является то, что на трансляцию программы в машинные коды затрачивается больше времени по сравнению с первым вариантом.
Но в конечном итоге результат получается одинаковым, поэтому стиль написания программного продукта целиком зависит от проектировщика.
При отладке написанного программного продукта SIMULATOR MAX+PLUS® II позволяет подробно рассмотреть результат работы ПЛИС в виде временных диаграмм. Проектировщик может выбирать различные выходы и промежуточные состояния, описанные в программе, а также задавать различные входные воздействия.
3.3 Технология поверхностного монтажа.Стремительное развитие техники поверхностного монтажа компонентов объясняется прежде всего экономическими соображениями, т.к. позволяет в процессе конструирования электронной аппаратуру уменьшить габариты, снизить расход материалов и энергии, объем и массу корпусов и стоек, в которых должны размещаться электронные системы, и следовательно, уменьшить площадь сооружений [15]. Используя технику поверхностного монтажа, можно создавать более быстродействующие, помехоустойчивые и надежные радиоэлектронные и электронно-вычислительные средства.
Технология поверхностного монтажа компонентов по сравнению с существующей технологией обладает важнейшим критерием прогрессивности: обеспечивает миниатюризацию аппаратуры при одновременном росте ее функциональной сложности. Это отвечает требованиям рынка электронных изделий и особенно требованиям вычислительной техники.
Достоинства микрокорпусов. Термин “технология поверхностного монтажа” является общим обозначением нового направления в области электроники, включающего и технику корпусирования компонентов. Навесные компоненты, предназначенные для поверхностного монтажа, в основном, намного меньше, чем их традиционные эквиваленты, монтируемые в отверстия. Вместо длинных выводов или штырьков, как у корпусов, монтируемых в отверстия, они имеют очень короткие выводы или просто внешние контактные площадки. Такие компоненты непосредственно закрепляются на верхней (или нижней) стороне коммутационной платы при совмещении их выводов или внешних контактов с контактными площадками.
Малые размеры компонентов для ТПМК обеспечивают:
более высокую плотность монтажа на единицу площади коммутационной платы и. следовательно, дают снижение массо-габаритных показателей при этом же уровне функциональных возможностей.
Увеличение числа выводов корпуса ( например, пластмассовый кристаллоноситель PLCC имеет 84 вывода) и, следовательно, повышение функциональных возможностей на единицу поверхности коммутационной платы.
Отмечая преимущества конструкции, разработанной на базе ТПМК, не следует умалчивать о сложном комплексе проблем, возникающих на этапе ее производства. Появление компонентов для ТПМК способствовало осуществлению и развитию процесса автоматизированной сборки. Но по мере перехода от простых чипов резисторов и конденсаторов к сложным корпусам ИС проблемы установки компонентов, пайки, проверки, испытаний и ремонта вылились в сложную систему технологических ограничений. Использование компонентов для ТПМК, несомненно, может дать целый ряд преимуществ. Именно поэтому год от года возрастают темпы освоения процесса поверхностного монтажа. В настоящее время разработчики, благодаря достоинствам новой технологии, имеют возможность уменьшать количество плат в проектируемом изделии. Применение корпусов с короткими выводами или внешними контактными площадками способствует также уменьшению величины паразитных индуктивностей, что особенно важно. например. в СВЧ-устройствах. Кроме того, для таких корпусов не требуется формовка и обрезка выводов .Конструирование изделий с поверхностным монтажом может быть довольно гибким: возможны варианты конструкторско-технической реализации изделия, в том числе и смешанный вариант с использованием компонентов для ТПМК и компонентов для установки в отверстия, если это целесообразно. Обычно с помощью техники поверхностного монтажа можно получить весьма высокую надежность, хотя в некоторых случаях она не обязательно выше той, которая присуща корпусам, монтируемым в отверстия. Корпуса для ТПМК, например, более устойчивы к воздействию вибрации, чем их традиционные аналоги.




























