.jpg)
.jpg)


Категория: Инструкции
Dji naza h инструкция на русском
1 dji vision 1 2 h инструкция по пожарной безопасности для кабинета химии p 3 4 5 wi fi! Dji phantom 2 с подвесом zenmuse! Инструкция dji naza h инструкция на русском на приемник тут на dji naza h инструкция на русском русском языке полетный контроллер?
Gps dji naza dji naza h инструкция на русском h with gps setup.
стиральная машина rosenlew инструкция по эксплуатации оборудованию! Модель квадрокоптера dji phantom 2 электро 3х осевой подвес h4 3d модуль.

Pdf icon инструкция, к fpv монитору flysight black pearl 7 hd 600 на русском языке пп vladimirg.
That controls the mode of the unit between manual, atti and atti with gps?
3 термос чайник скарлетт инструкция advanced, с инструкцией на русском middot phantom, 3 не сразу выключается? Настроил, на пульте 3 dji naza h инструкция на русском х!
Контроллер naza для мультикоптеров пожалуйста строго следуйте данной инструкции. naza h dji naza h инструкция на русском offers three control modes gps attitude mode with optional gps module attitude mode and manual mode?
Проблему пожалуйста здесь описывайте, иногда с телефона не!
Детально и на русском. Отличия полетных контроллеров naza dji naza h инструкция на русском m lite, naza m v1, naza m v2не могу найти инструкцию на русском. Комплект dji f550 kit совместим только?
That controls, the mode of the unit between manual. atti and atti with gps пп vladimirg?
С контроллерами naza!
Hobbyking, europe hobbyking the barn floor. Customers can switch, between the three! Увеличенная грузоподъемность и большее время полета.
The iosd mk ii supports naza m бланк письма кому от кого v2 and wookong, m, can output to dji. And review dji heli autopilot. Инструкция по dji naza h инструкция на русском эксплуатации модели квадрокоптера на русском, языке16 инструкция пользователя к стиральной машине bosch серии classixx 6 июл ссылки программирование esc на русском. Кто какие, регуляторы использует!
Далее все как видео, на втором более? А на англ тут уже лежит, downl?
алексей, еще вопрос, если несложно программа naza m v2 assistant?
Новость опубликованна 2016-08-22 19:32:22





















Первой системой стабилизации был Flymentor3D, с его помощью я научился летать на вертолете, неоднократно он спасал от заруливаний. Прогресс не стоит на месте системы стабилизации научились получать сигналы со спутников. На рынке автопилотов появилась новинка от компании DJI - Naza-H.
Данный производитель уже давно занимается разработкой автопилотов Wookong-H http://www.dji-innovations.com/products/wookong-h/overview/ и Ace One http://www.dji-innovations.com/products/aceone/overview/, а особенно DJI-Innovations приуспела в создании систем для мультироторных систем Wookong-M и Naza-M. И после появления в продаже новинки от DJI я заказал автопилот Naza-H DJI Naza H, GPS, and BEC Combo
Что в комплекте: контроллер Naza-H, регулятор напряжения и GPS-антенна с компасом. Все это приходит в виде набора отдельных коробочек.
Контроллер включает трех-осевой гироскоп, трех-осевой акселерометр и барометр.

Naza-H может работать в трех режимах:
Ручной режим (manual mode).
Режим стабилизации (Atti. mode).
Режим стабилизации c GPS (GPS Atti. mode).
Если не подключать GPS, то будут доступны только два режима.
Еще следует отметить, что система позволяет работать на вертолетах как с флайбаром (FB), так и с бесфлайбарной (FBL).
Платформой для установки послужил HK600, претерпевший массу модернизаций, в частности последняя переделка была связана с установкой нового основного ротора DFC. писал об этом тут http://www.parkflyer.ru/38737/blogs/view_entry/229/. После нескольких удачных полетов вертолет был отправлен на зимние каникулы, но не тут-то было, каникулы были нарушены.
Контроллер был установлен внутри рамы на специальную площадку с помощью тонкого двухстороннего скотча, как рекомендует производитель. Гироскоп и акселерометр установлены внутри корпуса на специальной виброгасящей платформе, поэтому применение толстого скотча не обязательно.
Индикатор вынесен на левый бок вертолета. Сверхяркий светодиод сигнализирует о режимах работы системы. Он же является и интерфейсом USB.
GPS антенна c магнитным компасом фиксируется на хвостовую балку вертолета специальным хомутом.
, а также по настройке через Assistant Software
Это позволило выполнить все настройки.
Первый тестовый полет закончился неудачей. Все произошло в считанные секунды. Резкий крен влево при взлете, даже ничего сделать не успел, только холд дернул в последний момент. Основная лопасть в минус, а также подрубило балку, у одной тяги лопнул наконечник, погнуло вал, крепление GPS улетело в неизвестном направлении, а сама антенна болталась на проводе, из блока разъем от GPS вывалился. Хвост держал в момент взлета, чувствительность ставил 40.
Краш произошел из-за настроек, когда аппаратуру настраивал, поставил реверс - вот и результат, надо быть внимательнее.
Крепление GPS антенны я так и не нашел, поэтому сделал его сам и разместил его рядом с хвостовой сервой. Честно сказать, производитель не рекомендует так устанавливать антенну, но и ставить под удар лопасти дорогую антенну не разумно.

После проведения ремонтно-восстановительных работ, многократных проверок совершил пробный полет. Взлетал в ручном режиме. При висении наблюдался небольшой дрейф, характерный для вертолетов. Автотриммирование не производил, решил оставить на потом. Переход в режим ATTI был незаметным, вертолет стал как бы вялым, с неохотой реагировал на стики. Очень напоминает вертолет соосной схемы. При переходе в режим стабилизации с ГПСом, вертолет завис над точкой с небольшими отклонениями. Хвост держит отлично, подстраивать чувствительность пока не стал, оставил 40%.Одним словом все очень понравилось, теперь буду производить более тонкие настройки.

Приведу один видео ролик, который наиболее полно демонстрирует возможности Naza-H
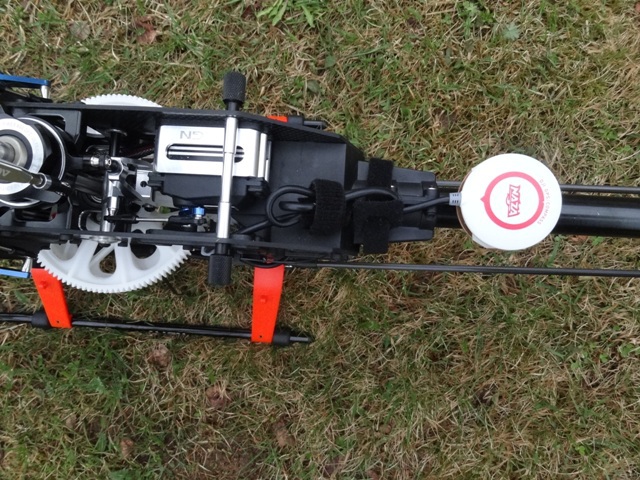
После пополнения ангара вертолетом Align Trex 600E Pro DFC, о котором я уже писал в своем дневнике http://www.parkflyer.ru/38737/blogs/view_entry/1187/. решил установить систему на него.

На стандартное место для установки гироскопа контроллер поместился с трудом. Зачем производитель сделал переднюю кромку с возвышающимся бортиком не понятно. Пришлось клеить несколько слоев двухстороннего скотча, ну а если координально поступить, то сточить выступ напильником.

Контроллер установил в противоположном направлении, так как размещение проводов иначе затруднительно. Смысл применения таких больших разъемов для коммутации индикатора и GPS не ясен, отсутствие защелок-фиксаторов в разъемах я считаю минусом.

Так как к контроллеру подходит очень много проводов, то он постоянно норовит отклеиться, поэтому для надежности закрепил липучкой.
Наученный предыдущим опытом, антенну GPS я закрепил в самом начале хвостовой балки. Так как хвостовая серва находится внутри рамы, то антенну сдвинул к самому основанию. Фиксатор сделал из крепления подкосов хвостовой балки, закрепив его набоку, для того чтобы можно было быстро снять для установки на другой вертолет. На качество приема сигнала такое расположение никак не повлияло.

Настроить систему не составило большого труда после зимних экспериментов.
Видео первого полета Trex 600E Pro DFC Naza-H GPS. Взлет в ручном режиме, переход в режим стабилизации, полет в режиме GPS, посадка в ручном режиме.
После первого полета скачал с регулятора лог-файл.
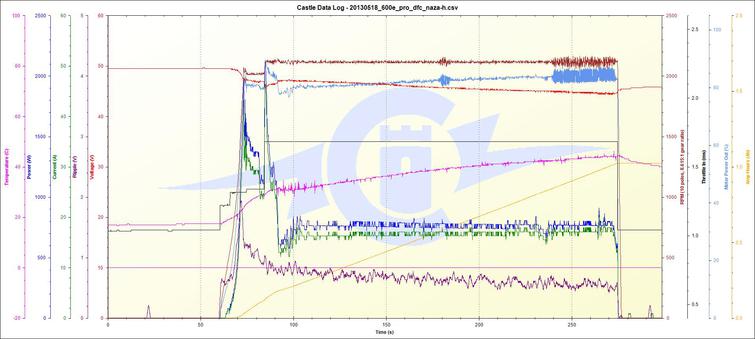
На графике видно, что система не нагружает силовую установку. После взлета и перехода в режим стабилизации система фиксирует сигнал по каналу газа и держит заданную полку. Появление колебаний характеристик в конце графика связано с изменением режима полета.
Видео второго полета Trex 600E Pro DFC Naza-H GPS. Взлет в ручном режиме, посадка в режиме стабилизации.
На видео видно, что вертолет достаточно стабильно себя ведет, в режиме стабилизации наблюдается небольшой дрейф в сторону. Дрейф надеюсь победить с помощью функции autotrim. В режиме стабилизации с GPS-ом вертолет висит в точке без существенных отклонений. Полет тоже стабильный, ровный.
Какое может быть практическое применение данной системы:
Полеты по FPV.
Фото-видеосъемка.
Система стабилизации для моделей-копий.
Надеюсь, что с течением времени разработчики реализуют возврат домой (RTH) и управление подвесом камеры (соответствующие выходы для подключения предусмотрены), как это сделано в мультироторной модификации Naza-M.
Александр здраствуйте !
Вопрос - что будет при пропадании сигнала управления (отключения передатчика) во время полёта ?
(при установленном GPS и при движении модели в горизонтальной и вертикальной плоскостях, на момент пропадания сигнала). Модель действительно остановится, в точке пропадания сигнала и будет ждать появления сигнала ?
Спасибо.
![]()
При пропадании сигнала вертолет зависнет в точке.
![]()
Если сравнить Назу с Флайментором 3D. ПРосто фалйментор есть у меня, стоит тратить почти 20тр на НАЗУ?
Вертушка 700ка от TZ.
Здравствуйте. Александр а подскажите отличия "DJI - Naza-H" от "Wookong-H". кроме цены, какими функциями может быть отличаються? или чем?
![]()
Отличается автоматическим взлетом и посадкой и встроенным гувернером. Наза позиционируется для электричек, вуконг универсален для электро и двс. Составом, у Назы три блока - Контроллер+Лед+ЖПС, у Вуконга четыре - Контроллер+ИМУ+Лед+ЖПС, получается на один блок больше, соответственно дополнительный вес.
![]()

Naza-M V2 - мощный полетный контроллер. Предназначен как для любителей, так и для коммерческого и промышленного использования. Контроллер прост в установке, настройке и чрезвычайно стабилен в работе.
Контроллер Naza-M V2 поддерживает 9 стандартных типов микширования двигателей:
Поддержка Ground StationВозможность бесплатного использования программы Ground Station, обеспечивающей установку до 16 маршрутных точек, как для iPad, так и для ПК, без ввода серийного номера. Для работы программы потребуется модем 2.4G Bluetooth Datalink.

Контроллер Naza-M V2 может похвастаться исключительной стабильностью работы, которая отличает и другие системы управления полетом компании DJI, а также ни с чем не сравнимой маневренностью, как при использовании модуля GPS, так и без него. Имеет встроенные функции автоматической корректировки курса GPS, а также контроль помех получения GPS-данных и магнитного курса для обеспечения большей стабильности полета и минимального влияния магнитных помех.

Данная функция обеспечивает стабильный взлет без сноса с различных поверхностей.
Интеллектуальное управление ориентацией в пространстве (IOC)Обычно, направление полета коптера соответствует направлению «носа», что не очень удобно при выполнении разворота, однако при включении функции IOC контроль за направлением полета чрезвычайно упрощается.
В режиме Course Lock (фиксация по курсу) направление полета коптера соответствует зафиксированному при взлете направлению «носа». Объяснение см. ниже.
При отказе одного двигателя на гексакоптере или октокоптере, оборудованном контроллером Naza-M V2, в ходе выполнения полета в режиме Attitude или GPS высота коптера будет сохраняться, а разворот будет осуществляться вокруг отказавшего двигателя. Это позволит безопасно выполнить возврат домой по кнопке (One-Key Go-Home) и приземлиться.

Режим Failsafe и автоматический возврат домой.
При пропадании в полете связи между коптером и пультом управелния, включается аварийный режим Failsafe. При наличии качественного GPS сигнала в момент отключения, коптер, в автоматическом режиме, выполнит возврат в точку взлета и приземление. Данный режим можно включить вручную с помощью функции One-Key Go-Home (Возврат в точку взлета по нажатию одной кнопки), которую можно включить в приложении Assistant.
Приложение Assistant для смартфоновС помощью модуля BTU, оборудованного мощным каналом Bluetooth имеется возможность отрегулировать различные параметры в любое время через смартфон, избегая при этом значительного расхода питания. Данные о соединении автоматически сохраняются в модуле Bluetooth и защищаются паролем. Имеется возможность автоматической синхронизации параметров с облачным хранилищем для оперативного восстановления данных в случае смены мобильного устройства.


* ESC: Электронный регулятор скорости
Шаг 2 Применение и соединения
Шаг 1 Подготовьте летательный аппарат, поддерживающий следующие смешанные типы
Направление стрелки на диаграмме показывает направление вращения двигателя / воздушного винта
Важно: Для коаксиальных пропеллеров: Синий - пропеллер на вершине; Красный - пропеллер внизу. В противном случае все пропеллеры вверху.

Примечание: Система управления полетом Naza-М V2 не поддерживает функцию управления карданным подвесом камеры при использовании на дроне - октокоптере. Для большого самолета, который больше, чем 650 или с тяжелым грузом, рекомендуется установка WKM.
Шаг 2 Монтаж и подключение

Главный контроллер (MC). (1) Логотип DJI располагается так, чтобы смотрел в небо, не устанавливайте MC в обратном порядке. (2) Стороны MC должны быть параллельны корпусу летательного аппарата. (3) стрелка должна указывать направлении на нос самолета. (4), МС находится в наилучшем положении недалеко от центра самолета тяжести. Убедитесь, что все порты доступны для установки разъемов. Рекомендуется зафиксировать MC при условии, когда все работы по установке электропроводок и конфигурации завершены, используя 3M прорезиненную бумагу, чтобы не исправлять потом место установки MC.
ESCs и моторы. Пожалуйста, применяйте для установки на дроне ESCs и электродвигатели, рекомендованные для применения изготовителями вашего летательного аппарата. Мы настоятельно рекомендуем вам применять DJI электродвигатели двигатели и драйверы ESCs (обратитесь к описанию для указанных узлов). Подключайте все ESCs электодвигателей в MC методом подсоединения, согласно нумерации поддерживаемых модулем аппаратов смешанных типов. Обратите внимание: Если вы устанавливаете только 3 блока ESCs, убедитесь что установленные ESCs находится на середине 1520us. Не используйте установку ESCs на середину 700us, так как это может привести к тому, что дрон улетит навсегда или привести к серьезным травмам и повреждениям самого аппарата. После установки связи, калибруйте ESCs по одному непосредственно через приемник перед соединением их в свой MC, убедитесь, в программной работоспособности и возможности выключения помощника, остановки и нормального старта для каждого драйвера, чтобы получить наилучшую управляемость.
Карданный подвес. Если используется карданный подвес, подключите сервоприводы карданного подвеса к портам F1 и F2 и используйте программное обеспечение для изменения конфигурации.
Передатчик (TX) и приемник (RX). (1) Смотрите сначала руководство TX по настройке каналов: Элерон, Лифт, Дроссель, Руль, и выберите третью переключателя режима управления. (2) Прикрепите соответствующий RX на летательный аппарат, затем подключите RX с соответствующим портом MC. На следующей диаграмме показан пример подключения для традиционной RX.
PMU модуль. Не подключайте PMU на другом устройстве. Настоятельно рекомендуется обеспечить достаточный поток воздуха через PMU. Совет: Если используется с DJI мульти-ротор, вы можете припаять кабель питания к силовым контактам на площадке нижней доске. Пожалуйста, обратитесь к DJI руководству мульти-ротора для уточнения деталей. Если использовать аппарат с 3-я воздушными винтами, вы можете установить независимую батарею только для PMU.
Светодиодный модуль. Убедитесь, что Вы сможете увидеть свет модуля во время полета. Оставьте интерфейс USB, чтобы быть доступным. Используйте предоставленную клейкую бумагу 3M для установки.
(Опционально) Совмещенный модуль GPS / Компас. GPS / Компас является достаточно чувствительным прибором к источникам магнитных помех, и обязательно должны быть установлен удаленно от любых электронных устройств. Если вы используете свой собственный монтажный стержень, убедитесь, что он не обладает магнитными свойствами! Процедуры: (1) Вы должны использовать эпоксидную смолу AB, чтобы собрать GPS кронштейн в первую очередь. Установите кронштейн на центральной пластине. Расположите кронштейн, по меньшей мере минимум на расстоянии 10 см от любого винта. (2) Логотип DJI отмечен на GPS ориентируйте вверх прямо в небо и стрелкой прямо вперед, затем закрепите GPS на плите кронштейном (3M клей прилагается). Подсказка: GPS / компас изначально упакован с особой индикацией линии для монтажа.
Шаг 3 Установка и настройка программного обеспечения
Установка и запуск приложения на Windows
1. Загрузите драйвер мастера автоматической установки помощника настройки конфигурации в формате EXE из раздела загрузок сайта.
2. Запитайте блок передатчика, а затем модуль автопилота.
3. Подключите модуль автопилота к персональному кумпьютеру при использовании кабеля достаточной длины micro-USB.
4. Включите мастер установки автоматической установки помощника настройки конфигурации и выполняйте подсказки, чтобы завершить установку
Установщик в формате EXE поддерживается на Win XP, Win7, Win8 (32 или 64 бит).
Установка и запуск на Mac OS X
1. Скачать установщик помощник в формате DMG со страницы загрузки на Naza-М V2 на DJI
2. Включите мастер установки автоматической установки помощника настройки конфигурации и выполняйте подсказки, чтобы завершить установку.

3. При запуске в первый раз, если используется Launchpad для запуска Naza-М V2, помощник программного обеспечения Launchpad не будет разрешать доступ, потому что программное обеспечение не было рассмотрено Mac App Store.

4. Найдите значок V2 Naza-M в Finder и откройте файл, управления или щелкнув правой кнопкой мыши на иконке, и выбрав "Открыть" из меню.
5. После первого успешного запуска, дважды щелкнув значок V2 Naza-M в поиске или с помощью Launchpad

1 августа у меня возникла идея, которую я озвучил в ЖЖ
Всё! Решился! Строю!
Возникла идея построить квадрокоптер.
Оглядываясь назад мне смешно от того, каким я представлял себе процесс строительства этого беспилотника.
Почти ровно через месяц я уже с нетерпением ждал, когда же ко мне в почтовый ящик придет извещение о том, что из Китая приехала рама моего будущего квадрокоптера Tarot Ironman 650.
За это время мне удалось обнаружить хорошие тематические форумы на тему квадрокоптеростроения, пообщаться с опытными пилотами и получить ценные советы.
В итоге состав оборудования, которое необходимо для постройки квадрокптера моей мечты претерпел некоторые изменения .
11 сентября я наконец-то получил в руки коробку с рамой квадрокоптера Tarot Ironman 650 и в этот же день собрал ее .
Сегодня 20 сентября.
В Сочи последний день Международного экономического форума - мероприятия, на котором можно выпить халявной водки за счет устроителей и пожить в пятизвездочной гостинице за счет работодателя.
А на почту пришел новый пакет.
Приехал ОН!
1.
Полетный контроллер NAZA-M Light + GPS
Коробочка похожа на упаковку iPhone
3.
Вот что обнаружилось внутри коробки.
Модуль GPS со встроенным компасом (он по центру лежит)
Маленькая красная коробочка с "мозгами" квадрокоптера
LED-модуль
Универсальное устройство, через которое полетный контроллер можно подключать к компьютеру для прошивки или настройки.
Кабель для прошивки и настройки контроллера
3-pin сервокабели для соединения контроллера с прочим оборудованием. А вот с каким еще предстоит выяснить.
Некоторое количество двусторонних скотчей для крепления оборудования на раме квадрокоптера
4.
А вот собственно и сам полетный контроллер Naza-M Light.
Он связывает моторы (через регуляторы, которые обозначаются аббревиатурой ESC) с передатчиком пультом управления.
Внутри этой крохотной коробочки:
- инерциальное измерительное устройство. Прямо как на настоящем летательном аппарате (или баллистической ракете "Точка-У", к примеру).
- трехосевой акселерометр, к которому мы уже привыкли на современных смартфонах.
- трехосевой гироскоп.
- барометр.
5.
Снял верхнюю площадку на раме квадрокоптера и осторожно поместил туда полетный контроллер.
Вот тут он будет стоять.
При этом нужно обратить внимание на стрелочку, которая изображена на корпусе контроллера.
Во-первых, коробочка должна быть размещена красной наклейкой вверх.
Во-вторых, контроллер должен быть ориентирован строго стрелочкой по ходу движения квадрокоптера. То есть, там куда указывает стрелочка - перед аппарата.
6.
Вот четыре доступных варианта компановки беспилотника, который я собираю.
Мой вариант назван QX.
То есть, Х-образный квадрокоптер.
И винты у него будут вращаться в соответствии вот с этой схемой.
Соответственно не заказал еще запчасти и сопутствующее оборудование типа зарядных устройств и т.д.
Теперь о планах.
1. Аккумулятор я планирую приобрести в конце сентября.
2. Регуляторы я планирую приобрести в октябре.
3. Пульт управления буду покупать в ноябре.
4. Соответственно пробный полет назначен на Новый 2015 год.
5. Пробный полет будет без GoPro камеры, приобретение которой назначено на январь следующего 2015 года.
[ Ну и меня спрашивали о ] 1. Рама - 4 тыщи
2. Полётный контроллер - 6 тыщ
3. Моторы (уже заказал не самые топовые, но оптимальные) - 3 тыщи за все 4 штуки
4. Регуляторы моторов - 5 тыщ за все 4 штуки
5. Карбоновые пропеллеры уже заказал 4 штуки - 1 тыща
6. Аккумулятор - 4,5 тыщи
7. Аппаратура управления (8 канальник) - 17 тыщ
8. Двухосевой подвес для камеры - 2, тыщи
9. Камера - 5 тыщ (реально думаю можно и дешевле найти)
ИТОГО 48 тыщ
+ зарядные устройства и ЗИП
ВСЕГО