



Категория: Инструкции
Прицепной раздатчик-смеситель РСП-10 предназначен для транспортировки, смешивания и равномерной раздачи полученной смеси на фермах и откормочных площадках. Агрегатируется с колесными тракторами типа МТЗ-80/82. РСП-10 состоит из кузова (рис. 22.3), карданной передачи, рамы 5, ходовых колес 6, коробки цепных передач, заслонки и выгрузного транспортера.

Рис. 22.3. Схема работы раздатчика-смесителя РСП-10
1 — кузов; 2, 3 — верхний и нижний шнеки; 4 — карданная передача; 5 — рама; 6 — колесная пара; 7 — коробка цепных передач; 8 — заслонка; 9 — выгрузной транспортер; А, Б — направления движения кормовой массы
Бункер имеет боковой выгрузной люк в средней части и отверстия в торцовых стенках для крепления подшипников шнеков и привода.
На задней стенке бункера размещена коробка цепных передач, внутри установлены три рабочих шнека. Нижний 3 и оба верхних 2 шнека состоят из труб, в концы которых вварены цапфы. К трубам приварены спирали с правой и левой навивкой.
В средней части нижнего шнека симметрично приварены два кольца-ворошителя. Оба верхних шнека на концах имеют отбивные витки (для предотвращения напрессовывания смешиваемой кормосмеси на торцовые стенки кузова), перед которыми приварены пальцы-ворошители.
Выгрузной транспортер состоит из сварного каркаса, цепочно-планчатого полотна, ведущего и натяжного валов. На ведущем валу установлена муфта автоматического включения транспортера. Заслонка выгрузного отверстия кузова приводится в действие гидроцилиндром.
Рама состоит из гнутых профилей. Дышло — из специальных гнутых профилей и приварено к основной раме.
Ходовая часть состоит из двух пар колес, установленных на качающихся балансирах. Колеса в каждой паре расположены последовательно, оборудованы тормозами и имеют давление в шипах 0,35 МПа.
Привод рабочих органов раздатчика — от ВОМ трактора через телескопический вал карданной передачи 4 и коробку цепных передач, размещенных в закрытом корпусе с масляной ванной.
Цепи и подшипники в корпусе смазывают разбрызгиванием масла. Выходной вал закрытого корпуса имеет предохранительное устройство в виде срезного штифта из стальной проволоки.
Технологический процесс. Перед загрузкой корма в бункер 1 закрывают выгрузное окно и загружают корм в определенной последовательности: сначала корма большей плотности, жидкие корма для лучшего смешивания загружают последними. Загрузку кормов ведут при работающих шнеках. По мере завершения загрузки одного компонента включают линию подачи другого. Корма перемешивают тремя шнеками: нижним 3 и двумя верхними 2.
Нижний шнек подает нижний слой кормовой массы на середину кузова и направляет ее вверх, два верхних транспортируют верхний слой корма от середины на края кузова, где масса под действием собственной массы ссыпается вниз. Таким образом в кузове образуются два контура смешивания: контур А и контур Б.
Раздают корма при скорости 4-6 км/ч. При большой норме выдачи кормосмеси скорость передвижения снижают, и наоборот. Норму выдачи и соответствующую ей скорость передвижения раздатчика регулируют в конкретных производственных условиях.
Если кормосмесь сухая (или повышенной влажности), т.е. обладает высокой сыпучестью (текучестью), то норму выдачи на 1 м длины кормушки регулируют величиной открытия задвижки.
В процессе эксплуатации раздатчика-смесителя наиболее часто ломаются шнек и предохранительные штифты. Причина этого — загрузка плохо измельченных кормов (длина фракции должна быть не более 50 мм). Степень загрузки кузова должна быть такой, чтобы в процессе смешивания у обоих торцов кузова оставались пустые пространства для пересыпания массы корма.
Раздатчик-смеситель РСП-10А по сравнению с РСП 10 имеет ряд изменений. Для снижения массы машины и ее высоты применена безрамная схема. Кузов РСП-10А сделан несущим и выполняет роль рамы. Прицепное дышло к трактору приварено к передней торцовой и нижней части кузова. В связи с ликвидацией рамы выгрузной транспортер и выгрузное окно кузова смещены к передней торцовой части кузова. Смещение транспортера повлекло за собой изменение конструкции шнеков: оба верхних шнека выполнены у РСП-10А с правой навивкой витков и с увеличенным шагом. В результате указанных изменений конструкции схема перемешивания компонентов корма стала одноконтурной по всей длине кузова.
Вал привода у машины РСП-10А оборудован предохранительной муфтой для предотвращения поломок деталей и разрывов цепей выгрузного транспортера при перегрузках. В конструкцию подвески валов приводов коробки смесителя и выгрузного транспортера введены три сферических подшипника закрытого типа с одноразовой смазкой, что уменьшило число течей смазки. Применены шарниры карданного вала с одноразовой смазкой.
Для определения степени открытия заслонки с места механизатора в конструкции привода заслонки предусмотрено визирное устройство с делениями.


















Каталог продукции » Аппаратура для измерения радона » Радиометр аэрозолей РАА-10
Радиометр аэрозолей РАА-10Назначение
Экспрессное измерение объемной активности дочерних продуктов распада (ДПР) радона и торона, определение ЭРОА радона и торона, величины "скрытой" энергии. Применяется для санитарно-гигиенического обследования помещений и территорий в соответствии с требованиями НРБ-99 и ОСПОРБ-99.Б
Основные технические характеристики
СПЕКТР-5, продолжительность замера, мин
СПЕКТР-2, продолжительность замера, мин
"РУЧНОЙ" - свободный выбор времени отбора и измерений, с
Диапазон измерений ЭРОА радона . Бк/м 3
Диапазон измерений ЭРОА торона . Бк/м 3
Погрешность измерений ЭРОА радона . не хуже, %
Объемный расход воздуха через фильтр, л/мин
Автоматическое перемещение фильтра
Питание от встроенных аккумуляторов и от сети
Число замеров при питании от аккумуляторов, не менее
290 x 110 x 200
Комплект поставки (базовый)
Радиометр внесен в Государственный реестр средств измерений под № 20430-00.
Заказать оборудование
Раздатчик-смеситель кормов РСП-10 п р е д н а з н а ч е н для приема заданной дозы компонентов (концентрированных кормов с добавками, сена, сенажа, силоса, гранул и др.), транспортирования, смешивания и равномерной раздачи полученной кормосмеси на фермах крупного рогатого скота, а также откормочных площадках. Агрегатируется с тракторами типа МТЗ-80/82.
Раздатчик-смеситель кормов РСП-10 (рис.5) с о с т о и т из металлического кузова 1 вместимостью 10м 3. смонтированного на шасси двухосного прицепа, выгрузного цепочно-планчатого транспортера 9, под ним направляющий лоток. Внутри бункера установлены три шнека, один нижний – 3, два верхних – 2. При вращении нижнего шнека за счет двухсторонней навивки нижний слой кормовых компонентов подается от торцов кузова к середине и поступает вверх к верхним шнекам, которые перемещают верхний слой кормов от середины бункера к его торцевым стенкам. При этом корма движутся по двум взаимно пересекающимся замкнутым контурам, и происходит смешивание компонентов корма.
Транспортер9 установлен напротив выгрузного окна бункера с заслонкой 8 и направляющим лотком. При переводе лотка в рабочее положение при помощи гидроцилиндра полумуфта привода транспортера замыкается, а при переводе в транспортное положение размыкается, включая и выключая транспортер. Заслонка при смешивании корма закрыта, а при раздаче открывается при помощи гидроцилиндра.
Привод рабочих органов осуществляется от ВОМ трактора типа МТЗ при помощи карданной передачи 4, четырех контурных цепных передач и вала привода транспортера. Цепные передачи размещены в коробке цепных передач 7 в масляной ванной, установленной на задней стенке бункера.

1 – кузов; 2, 3 – верхний и нижний шнеки; 4 – карданная передача; 5 – рама;
6 – колесная пара; 7 – коробка цепных передач; 8 – заслонка;
9 – выгрузной транспортер; А, Б – направления движения кормовой массы
Рисунок 5 – Схема работы раздатчика-смесителя РСП-10
При подготовке кормосмеси к раздаче ее компоненты согласно рациону загружают в бункер, как при отключенных шнеках, так и при работающих.
Рабочий процесс. Раздача корма осуществляется следующим образом. Заехав в кормовой проход животноводческого помещения, тракторист при помощи гидравлической системы, подключенной к кормораздатчику, опускает направляющий лоток и открывает заслонку выгрузного транспортера. При включении необходимой скорости перемещения агрегата (1,5…5км/ч) автоматически включается выгрузной транспортер, который выгружает заданное количество кормосмеси по лотку в кормушку.
Регулировки. Норма выдачи корма регулируется как скоростью передвижения кормораздатчика, так и высотой открытия заслонки.
После раздачи выключают ВОМ, закрывают заслонку выгрузного окна, поднимают кормонаправляющий лоток в транспортное положение и перемещают кормораздатчик.
Раздатчик-смеситель РСП-10А по сравнению с РСП-10 имеет изменения. Для снижения массы машины и ее высоты применена безрамная схема. Кузов РСП-10А сделан несущим и выполнят роль рамы. Прицепное дышло к трактору приварено к передней торцевой и нижней части кузова. Выгрузной транспортер и выгрузное окно смещены к передней торцевой части кузова. Изменена конструкция верхних шнеков. Шнеки выполнены с кривой навивкой витков и с увеличенным шагом. С изменением конструкции шнеков перемешивание компонентов корма стало одноконтурным по всей длине кузова.
Вал привода у РСП-10А оборудован предохранительной муфтой для предотвращения поломок деталей и разрывов цепей выгрузного транспортера при перегрузках.
В конструкцию навески валов приводов коробки смесителя и выгрузного транспортера введены три сферических подшипника закрытого типа с одноразовой смазкой, а также с одноразовой смазкой применены шарниры карданного вала.
Для определения степени открытия заслонки с места механизатора в конструкции привода заслонки предусмотрено визирное устройство с делениями.
В каждой аппаратной (на боевом посту, рабочем месте) должны быть должностная и эксплуатационная инструкции, а также необходимые средства защиты, предупредительные плакаты, средства пожаротушения, обеспечивающие безопасность работ и медицинская аптечка.
В инструкциях отражаются правила и меры безопасности, установленные инструкцией по эксплуатации конкретных средств связи, РТО и АСУ, особенности эксплуатации их основного оборудования, обязанности должностных лиц (лиц дежурной смены) по выполнению правил и мер безопасности при приеме и несении дежурства, развертывании (свертывании) основного оборудования, выполнении регламентных и ремонтных работ, а также при авариях и отказах оборудования.
Каждый военнослужащий, заметивший неисправность или неправильные действия личного состава, ведущие к нарушению правил безопасности, обязан об этом немедленно доложить своему начальнику и принять меры к устранению нарушения при строгом соблюдении правил и мер безопасности. Источниками опасности при работе на РСП-6М2 являются автомобиль, электроагрегаты, токонесущие части аппаратуры, аккумуляторы, антенно-мачтовые устройства, электровакуумные приборы, электромагнитное излучение.
При эксплуатации системы личный состав обязан выполнять следующие требования:
во время проведения всех видов технического обслуживания необходимо использовать средства защиты: резиновые коврики, диэлектрические перчатки, защитные очки, инструмент с изолированными ручками, заземляющую штангу и тщательно следить за их состоянием. Коврики должны быть сухими и чистыми. Все средства защиты должны быть учтены, исправны и своевременно подвергаться испытаниям;
включать аппаратуру под напряжение разрешается после тщательной проверки наличия имущества, исправности оборудования и с личного разрешения преподавателя (инструктора практического обучения);
не разрешается включать электродвигатель вращения антенны ДРЛ и оставлять ее направленной на жилые объекты при включенном высоком напряжении на передатчиках;
при вскрытии высоковольтных блоков необходимо пользоваться резиновыми перчатками. После вскрытия блока для проведения дальнейших работ следует заземленной штангой разрядить все высоковольтные детали. Необходимо строго соблюдать требования, указанные в предупреждающих надписях на стойках и блоках систем;
при отыскании неисправностей, когда необходимо производить осмотр и измерения в блоках, следует соблюдать осторожность: не касаться руками токонесущих частей; работать стоя на резиновом коврике. Выполнение таких работ разрешается только при наличии двух лиц.
ВНИМАНИЕ! В АППАРАТУРЕ РСП-10МН ИСПОЛЬЗУЕТСЯ НАПРЯЖЕННИЕ ОПАСНОЕ ДЛЯ ЖИЗНИ.
ПОМНИ! Включение аппаратуры допускается только при исправных цепях блокировки высокого напряжения и при обеспечении надежного заземления шкафов аппаратуры.
находиться вблизи антенны в поле излучения во время работы станции;
стоять под мачтами посторонним лицам во время их подъема и опускания;
отключать антенны при включенном высоком напряжении;
под напряжением подключать и отключать электрические кабели и провода, вынимать блоки, заменять предохранители, радиолампы и детали, производить пайку;
устанавливать предохранители, не соответствующие номиналу или соединять контакты проволокой;
изменять расположение монтажа и деталей, а также производить какие-либо изменения в схемах, если изменения не предусмотрены соответствующей документацией;
регулировать контуры задающих генераторов, гетеродинов и УПЧ;
протирать кабели из резины, а также кабели в металлической оплетке бензином, минеральными маслами или другими растворителями резины;
включать высокое напряжение при выдвинутых блоках управления передатчиков и открытых дверях шкафов передатчиков;
пользоваться инструментом, приводящим к порче оборудования системы;
производить грубую механическую очистку посеребренных поверхностей (очистку посеребренных поверхностей разрешается производить с помощью ученической резинки или промывкой спиртом).
Профилактические осмотры и регламентные работы системы, не связанные с электрической проверкой аппаратуры, производить только при выключенных источниках электропитания.
При проведении осмотра блоков системы не допускается:
проверять места паек на механическую прочность и соединений путем отгибания, натяжения или раскачивания проводов;
вскрывать измерительные приборы, кварцедержатели, шунты и добавочные сопротивления к приборам;
проверять резким покачиванием надежность крепления в панелях радиоламп;
трогать контакты реле руками, отгибать контактные пружины или нажимать на них для проверки хода якоря.
При смене всех типов ламп следует помнить, что температура баллона ламп при работе может достигнуть 100-200 0 .
Подготовка к включению, включение и проверка работоспособности РСП-10МН
ПОДГОТОВКА АППАРАТУРЫ К ВКЛЮЧЕНИЮ
Внешний осмотр. Тщательно осмотрите в аппаратной машине снаружи и внутри все блоки и убедитесь в наличии и целости радиодеталей, а также в отсутствии видимых повреждений электромонтажа и механических узлов.
Проверьте наличие предохранителей в блоках, надежность кабельных и волноводных соединений, нулевые показания индикаторных приборов.
Убедитесь в исправности механизмов и узлов электроприводов антенн и в наличии зацепления рычагов сельсинов индикации положения механизма наклона антенны курса и доворота антенны глиссады.
Проверьте состояние аккумуляторов и наличие в них электролита в соответствии с инструкцией по эксплуатации.
Исходные положения органов управления на передних панелях распределительного щита и блоков аппаратной в следующие положения:
а) на распределительном щите – переключатель питания радиолокаторов ФИДЕР I – ФИДЕР II, автоматы ДРЛ, ПРЛ и ВЕНТИЛ. тумблеры КОНТРОЛЬНЫХ ОТВЕТЧИК, АВАРИЙНОЕ ПИТАНИЕ РАДИОСТАНЦИИ – в положение «Откл.»;
б) на переходных устройствах выносных индикаторов переключатель УПРАВЛЕНИЕ ПРЛ на блоке БПУ-П – в положение «Местн. тумблер УПРАВЛЕНИЕ на блоке БК – в положение «Местн.»;
в) на стойках оператора ДРЛ и ПРЛ ручки ЯРКОСТЬ и ФОКУС на блоках ИКО-Д, ИК-П и ИГ-П в крайнее левое положение, тумблеры ПРИВОД АНТ. На блоке ИКО-Д и ПРИВОД АНТЕНН на пульте управления (ПУМ) блока ИК-П – в положение «Выкл.», тумблер ОВС-ВЫКЛ. – в положение «Выкл.», переключатели ВКЛЮЧ.ИНДИКАТОРОВ на блоке ВИ-Д и СЕТЬ на блоке ВИ-П – в положение «Выкл.», тумблер СПЦ 150 КМ – 90 КМ, расположенный на откидной панели блока ИКО-Д – в положение «90 км», переключатели РАДИОСВЯЗЬ и СЕТЬ на блоке ВРС-Д и радиосвязь на блоке ВРС-П – в положение «Выкл.», тумблеры 115 В на Р/с – 115 на ЩР на блоках ВРС-Д и ВРС-П – в положение в положение 115 В на Р/С, тумблер МАГНИТОФОНЫ-ВЫКЛ. На блоке ВРС-П – в положение «Выкл.», тумблеры ЗАПИСЬ-ВЫКЛ. И СПУ-ЛАР. На пульте управления магнитофоном – в положение «Выкл.» И «СПУ», ручку ЯРКОСТЬ на блоке радиопеленгатора – в крайнее левое положение, тумблер ПИТАНИЕ пеленгатора на коробке переключения – в положение дрл, а тумблер ЗАПИСЬ – в положение «ПРЛ», переключатель СЕТЬ-ОТКЛ. На блоке БУА-П – в положение «Откл.»;
г) на стойке передатчика ПРЛ переключатель СЕТЬ на блоке ПУ-П – в положение «Выключение передатчика», тумблер ВЫСОКОЕ НАПРЯЖЕНИЕ – в положение «Выкл.», ручку вариака – в крайнее левое положение до упора, тумблер ЗАПИСЬ ПК-ОТКЛ. – в положение «Откл.», переключатель ВКЛЮЧЕНИЕ на блоке НПО-П – в выключенное положение;
д) на стойке приемника ПРЛ переключатели КОМПЕНСАТОР, ФАЗОВЫЙ БЛОК, ПРИЕМНИК и ГЕТЕРОДИН на блоке ВП-П – в положение «Выкл.», переключатель РОД РАБОТЫ на блоке П-П установите в положение «Пасс.»;
е) на стойке передатчика ДРЛ переключатель СЕТЬ на блоке ПУ-Д – в положение «Выключение передатчика», ручку вариака на блоке ПУ-Д – в крайнее левое положение до упора;
ж) на стойке приемника ДРЛ переключатели ПРИЕМНИК и ЛБВ на блоке ВП-Д – в положение «Выкл.», тумблер ПРИЕМНИК-ОТВЕТЧИК и переключатель КОМПЕНСАТОР на блоке ВКПО-Д – в положение «Выкл.», тумблер ПИТАНИЕ ФБ и тумблер ФД-АД на блоке Ф-Д – соответственно в положения «Выкл.» И «ФД»;
и) на стойке ОВС тумблер БОП-ВЫКЛ. – в положение «Выкл.».
Включение электропитания аппаратной машины производится следующим образом:
а) дайте команду электромеханику на включение электростанции и подачу электропитания в аппаратную машину;
б) установите на распределительном щите в аппаратной машине тумблер включения подсвета в положение «Подсвет» и проверьте по вольтметру номиналы напряжения фаз на ФИДЕР I и ФИДЕР c помощью переключателя вольтметра, которые должны быть 220 В ± 5%;
в) проверьте правильность чередования фаз по лампам ФАЗО-ИНДИКАТОР, устанавливая переключатель фазоиндикатора в положения «Фидер I» и «Фидер II». При несоответствии яркости накала ламп соответствующим надписям ЯРКО и ТУСКЛО поменяйте фазы на щите кабельного ввода;
г) установите переключатель питания в положение «Фидер I» и «Фидер II»;
д) установите автомат ВЕНТИЛ. В положение «Вкл.».
УДК 621.396.967: 351.814
Рецензенты: канд.воен.н. доцент И.И. Шерстяк,
канд.техн.н. доцент В.А. Голоднов.
Р 15 Волков С.И. Каргапольцев А.А. Курилов Н.Н. Радиолокационная система посадки РСП-6М2: Учебное пособие. / Государственное образовательное учреждение высшего профессионального образования «Московский государственный институт радиотехники, электроники и автоматики (технический университет)». – М. 2010. – 153 с.
Рассматриваются предназначение, состав, тактико-техничес-кие характеристики и размещение на аэродроме радиолокационной системы посадки РСП-6М2, принципы действия каналов и устройств входящих в состав РСП-6М2 диспетчерского (ДРЛ-6М2) и посадочного (ПРЛ-6М2) радиолокаторов, приведены общие сведения об аппаратуре пеленгования, радиосвязи, объективного контроля, системе энергоснабжения и распределения питания РСП-6М2, а также требования к тактическим и техническим характеристикам РСП. Учебное пособие написано для студентов военных кафедр, обучающихся по программе подготовки офицеров запаса по ВУС 461700.
Табл. 6. Ил. 56. Библиогр. 6 назв.
Печатаются по решению редакционно-издательского совета университета.
ISBN 5-7339-0211-6 © С.И. Волков,
Н.Н. Курилов, 2010
Радиолокаторы различного назначения являются неотъемлемым элементом любой современной системы управления воздушным движением. К ним относятся обзорные (диспетчерские) радиолокаторы, посадочные, метеорологические и радиолокаторы обзора летного поля [1].
Наиболее важными из них являются обзорные (диспетчерские) и посадочные радиолокаторы, объединенные в радиолокационную систему посадки (РСП).
Основной задачей радиолокаторов РСП является обеспечение контроля и управления воздушным движением в районе аэродрома.
В рамках этой основной задачи с помощью радиолокационных систем посадки решаются задачи обнаружения воздушных судов, измерения их координат и параметров движения, радиолокационного опознавания на командно-диспетчерских пунктах (КДП) или командных пунктах (КП). Кроме этого, через РСП с воздушных судов группе руководства полетами (ГРП) может передаваться дополнительная информация: бортовой номер, высота, остаток топлива и т.п.
Передача радиолокационной информации от РСП к КДП может выполняться как по широкополосному кабелю (кабелям), так и по широкополосной радиотрансляционной линии.
Контуры управления воздушными судами могут функционировать как в ручном, так и в полуавтоматическом режимах, автоматизированных систем управления полетами (АСУП).
В последние годы, с поступлением на вооружение новых высокоточных радиолокаторов, в АСУП стало возможным реализовать автоматический режим управления, например, на этапе посадки.
Среди наземных радиотехнических средств самолетовождения и посадки значительное место занимают радиолокационные системы посадки самолетов типа РСП-6, РСП-7, РСП-8, РСП-10, РСП-11 и их модификации, играющие важную роль в процессе обеспечения управления летательными аппаратами (ЛА).
Радиолокационные системы посадки предназначены для посадки самолетов, оборудованных обычными связными радиостанциями, в сложных метеоусловиях днем и ночью. РСП является необходимым дополнением к средствам инструментальной посадки и позволяет решать задачи вывода самолетов в район аэродрома, наблюдения за воздушной обстановкой и регулирования воздушного движения в районе аэродрома, опознавания отдельных самолетов и групп самолетов, обеспечения захода и расчета на посадку путем задания летчику (экипажу) самолета курса посадки и глиссады снижения по командам с земли. Использование РСП позволяет повысить безопасность полетов, надежность радиолокационного контроля.
В состав радиолокационной системы посадки входят обзорно-диспетчерский (ОДРЛ) и посадочный (ПРЛ) радиолокаторы, а также радиопеленгаторы и средства связи.
Пространственное положение самолета, заходящего на посадку, относительно заданной линии планирования в РСП определяется с помощью специального посадочного радиолокатора. ПРЛ обеспечивает секторный обзор пространства в зоне взлетно-посадочной полосы (ВПП) в плоскости курса и глиссады планирования. Уклонение самолета от заданных курса и глиссады регистрируется на экранах курсового и глиссадного индикаторов радиолокатора. Одновременно по индикаторам определяется расстояние от самолета до точки приземления. Учитывая данные о положении самолета относительно линии планирования, руководитель посадки передает по радио на борт самолета команды, выполняя которые летчик выводит самолет на ВПП. ПРЛ позволяет обеспечить снижение самолетов любых типов вне видимости земли до высоты примерно 50 м.
В качестве ПРЛ широкое применение получили РЛС сантиметрового диапазона волн. Высокая точность и разрешающая способность угломерных измерений у такого локатора обеспечивается за счет использования остронаправленных антенн. Точность и разрешающая способность по дальности достигаются применением коротких импульсов. Обзор рабочего сектора осуществляется сканированием двух остронаправленных ДН во взаимно перпендикулярных плоскостях. Для борьбы с помехами, вызванными отражением сигналов от местных предметов, РСП используют методы селекции движущихся целей (СДЦ), а для увеличения дальности действия предусмотрен активный режим работы с самолетным ответчиком (СО).
Обзорно-диспетчерские радиолокаторы систем РСП используются для опознавания и контроля полетов самолетов в ближней зоне радиусом 50…60 км. По отметкам от самолетов, наблюдаемых на индикаторах кругового обзора (ИКО) диспетчерских радиолокаторов, осуществляются объективный контроль воздушной обстановки, регулирование движения на предпосадочных этапах и вывод самолета с заданной точностью в зону действия ПРЛ.
Использование выносных индикаторов РСП, установленных непосредственно на КДП, обеспечивает высокую степень информированности ГРП и оперативность выдаваемых данных о воздушной обстановке.
РСП имеют ограниченную пропускную способность, не исключают погрешностей при выдаче данных из-за ошибок операторов и подверженности помехам за счет отражений от рельефа местности и метеофакторов. В связи с этими ограничениями РСП при посадке используются в качестве дублирующих систем.
В настоящее время аэродромы Военно-воздушных сил Российской Федерации (ВВС РФ) в основном оснащены радиолокационными системами посадки РСП-10МН и РСП-6М2.
1. ОБЩИЕ СВЕДЕДЕНИЯ О РАДИОЛОКАЦИОННОЙ СИСТЕМЕ ПОСАДКИ РСП-6М2
1.1. Предназначение и состав
Радиолокационная система посадки РСП-6М2 предназначена для решения задач основных звеньев АСУП (рис.1.1): звена получения информации о фактической траектории полета ЛА и звена передачи экипажу ЛА информации, необходимой для коррекции траектории полета. Звено получения информации о траектории полета ЛА составляют средства радиолокации (CРЛ), а звено передачи информации составляют средства радиосвязи (СРС). Объектом управления являются ЛА, вручную пилотируемые летчиком по данным приборного оборудования (ПО) и командам управления, принимаемым радиостанцией (РС). Группа руководителей полетами и средства представления информации, используемые ею, составляют звено обработки информации и формирования команд управления.

Рис.1.1. Структурная схема АСУП на базе РСП-6М2
В АСУП на базе РСП-6М2 реализуется ручной метод управления ЛА (летчик вручную исполняет команды управления) в два этапа. Первый этап включает: управляемый вывод ЛА в ближнюю зону (рис.1.2); полет ЛА в ближней зоне по заданной траектории на заданном эшелоне; выход определенного (назначаемого) ЛА в зону посадки. На этом этапе управление ЛА (летчиком) с помощью команд осуществляет руководитель полетами в ближней зоне (РБЗ). Второй этап включает заход ЛА на посадку с выходом на заданную линию планирования (ЗЛП) и снижение по ней до начала визуальной посадки ЛА.
Данная АСУП используется для управления ЛА, не оборудованных аппаратурой радиомаячных систем посадки.
В состав РСП-6М2 входят:
1. Посадочная радиолокационная станция ПРЛС-6М2 (рис.1.3), включающая -
- диспетчерский радиолокатор ДРЛ-6М2;
- посадочный радиолокатор ПРЛ-6М2;
- автоматический радиопеленгатор АРП-11( Е-519);
- аппаратуру фоторегистрации радиолокационной информации;

Рис.1.2. Распределение воздушного пространства в районе аэродрома

Рис.1.3. Посадочная радиолокационная станция ПРЛС-6М2
два магнитофона МН-61 для регистрации аудиоинформации;
три радиостанции Р-863;
радиотрансляционную линию Е-531;
средства проводной радиосвязи.
2. Передвижная автономная электростанция ПЭП-6М2, включающая -
- два дизельных агрегата АД30-Т/230/Ч-400;
- преобразователь частоты ВПЛ-30МД;
- преобразователь напряжения ПО-500;
- щит распределения электропитания.
Электропитание РСП-6М2 осуществляется от трехфазной промышленной электросети напряжением 220/380 В и частотой 50 Гц через преобразователь частоты ВПЛ-30МД или от одного из двух дизельных агрегатов.
1.2. Размещение ПРЛС и ПЭП на автотранспорте
ПРЛС-6М2 размещается в основном в кабине прицепа КУНГ-1М и на тягаче КРАЗ-255Б и, частично, совместно с ПЭП-6М2.
На прицепе в кабине типа 351-СБ на колесном шасси МАЗ-5206 размещаются (рис.1.4, а):
- диспетчерский радиолокатор ДРЛ-6М2;
- автоматический радиопеленгатор АРП-11( Е-519);
- посадочный радиолокатор ПРЛ-6М2;
- устройство управления радиостанциями Р-863;
- устройства проводной связи;
- два магнитофона МН-61;
- щит распределения электропитания;
- устройство освещения, обогрева, вентиляции и наддува.
На тягаче размещаются укладка антенных устройств ДРЛ и ПРЛ и другое имущество ПРЛС.
Передвижная электроподстанция ПЭП-6М2 и часть оборудования ПРЛС установлены в кабине типа 352 на колесном шасси МАЗ-5206 и на тягаче КРАЗ-255Б (рис 4, б).
На прицепе в переднем отсеке кабины располагаются:
- три радиостанции Р-863;
- высокочастотные (ВЧ) устройства автоматического радиопеленгатора АРП-11 (Е-519);
- запасное имущество (ЗИП);
- комплект соединительных кабелей;
- места размещения радиолинии Е-531.
В заднем отсеке кабины установлены:
- два дизельных агрегата АД30-Т/230/Ч-400;
- преобразователь частоты ВПЛ-30МД;
- преобразователь напряжения ПО-500;
- щит распределения электропитания.
На тягаче укладываются антенные устройства АРП-11 и Р-863 и другое имущество.
Габариты кабины и прицепа в походном положении составляют 9290?2550?3300 мм. Масса - 16000 кг.
КУНГ с ПРЛС-6М2 на позиции показан на рис.1.5, а с ПЭП-6М2 на рис.1.6.
1.3. Размещение ДРЛ-6М2 и ПРЛ-6М2 в аппаратной ПРЛС-6М2
Общий вид аппаратной посадочной радиолокационной станции ПРЛС-6М2 показан на рис.1.7.
Блоки, пульты, панели ДРЛ-6М2 и ПРЛ-6М2 в основном размещены в двух рядах стоек С-01 и С-02 слева и справа соответственно, а также на пульте контроля и управления в передней части кабины. Каждая стойка выполнена в виде тумбы с выдвижными ящиками-блоками. Антенно-фидерные устройства ДРЛ-6М2 и ПРЛ-6М2 располагаются снаружи кузова (рис.1.3 и 1.5).
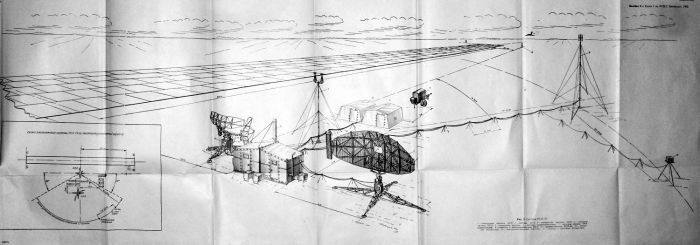
1.4. Размещение РСП-6М2 на аэродроме Радиолокационная система посадки размещается на аэродроме справа или слева от оси BПП на расстоянии 150…200 м и не более ? 200 м от середины BПП. Рекомендуется устанавливать объекты системы со стороны КДП и распределительного устройства внешней электросети (рис.1.8).
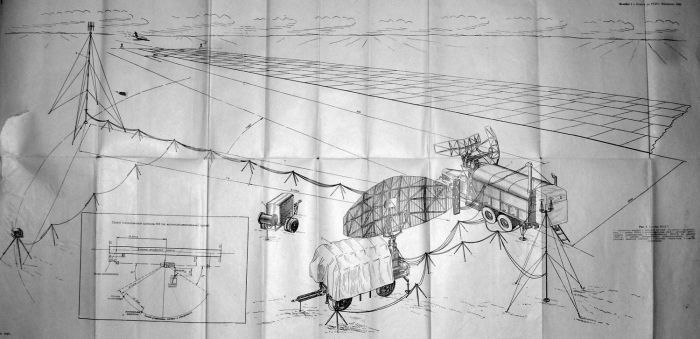
Рис.1.4. РСП-6М2 на марше
- БМГ – блок магнетронного генератора (МГ);
- БВНМ – блок выпрямителя накала магнетрона;
- БМОД – блок модулятора;
- БВВ – блок высоковольтного выпрямителя.
СП и У – стойка передатчика и управления:
- ПВК – передатчик вторичного канала;
- БУВ (2 шт.) – блок управления выпрямителем;
- БПМ (2 шт.) – блок подмодулятора;
- БВМ (2 шт.) – блок выпрямителя модулятора.
Размещенные в этой стойке БУВ, БПМ, БВМ структурно входят в состав передатчиков.
СПР-01 – стойка приемников первичного канала:
- БПР-011 (2 шт.) – блок приемника;
- БПЧ-С (2 шт.) – блок подстройки частоты.
СНПО-01 – стойка наземных приёмников ответа:
- НПО (2 шт.) – наземный приемник ответа;
- БП – 134 (2 шт.) – блок питания.
ССФР-01 – стойка синхронизации, формирования и развертки:
- БОСТ-011 (2 шт.) – блок обработки, синхронизации и трансляции;
- БРН – блок развертывающих напряжений;
- БП-135 – блок питания.
СКУ-01 – стойка компенсирующего устройства:
- БКИ – блок компенсатора импульсный;
- БУ – блок усреднения;
- БЧК – блок череспериодной компенсации;
- БЧВ – блок череспериодного вычитания.
СВП-01 – стойка выпрямителей приемника;
- БП-142, БП-138, БП-137 – блоки питания;
- БАК – блок автоматического контроля.
ПКУ – пульт контроля и управления (рис.2.2) содержит две части: диспетчерскую и посадочную. В состав диспетчерской части входят:

Рис.2.2. ПКУ с органами управления ДРЛ и аппаратуры отображения
- БОИ-М – блок обработки информации;
- ПУ БОИ – пульт управления БОИ-М;
- БИ-45 – блок индикатора кругового обзора;
- БУО-Д – блок управления отображением;
- БТУ – блок технического управления;
- ПУФ – пульт управления формулярами;
- ПИ – пульт измерителя координат;
- ДК – датчик координат;
- ПУРС – пульт управления радиостанциями.
Взаимодействие блоков и устройств ДРЛ показано на блок-схеме ДРЛ-6М2 (рис.2.3). Блоки питания на схеме не показаны.
Антенное устройство (АУ) содержит: приемопередающую антенну ДРЛ А0 ; две приемные компенсационные антенны АП1. АП2. жестко прикрепленные к А0 ; устройство вращения антенны (привод антенны) - УВА; датчики углового положения (углов поворота антенны) - ДУП.
В состав фидерного устройства (ФУ) входят устройства передачи сигналов (высокочастотных импульсов (ВЧИ)) первичного канала (УПС-I) и вторичного канала (УПС-II).
Необходимо заметить, что указанные названия устройств, блоков, пультов и других узлов ДРЛ используются в техническом описании ДРЛ. Они сложились в процессе конструирования и эксплуатации ДРЛ («технический язык»), но, к сожалению, не всегда согласуются с функциями, которые выполняют так называемые стойки, блоки, пульты. Не всегда грамотно, но специалистам так оказалось удобно.
2.4. Структурная схема и принцип действия ДРЛ
2.4.1. Структурная схема ДРЛ
При изучении принципа действия ДРЛ-6М2 все вышеуказанные стойки, блоки, пульты, выполненные и размещенные в соответствии с конструктивными, технологическими и эксплуатационными требованиями, целесообразно сгруппировать в устройства с четко определенными функциями, показанные на структурной схеме ДРЛ (рис.2.4).
Изучая принцип действия ДРЛ по структурной схеме, сначала рассмотрим работу канала получения первичной информации, а затем – канала получения вторичной информации.
В составе первичного канала используются:
- АУ – антенное устройство;